电机相关信息收集
六合一多功能转串口模块
Ardunio其实就是封装了底层调用API,开发者调用这些API编写应用,其实展开就是和普通C开发一样
当在Ardunio IDE选择板子时就是告诉底层API需要的配置参数
***步进电机与伺服电机通过驱动器给他们输入脉冲数控制转动角度***
***舵机是通过控制高电平的时长来控制角度***
***减速马达小电机大扭矩***
***电动伸缩杆、电磁拉杆***
***电磁锁***
***步进电机丝杆滑台套装***
***三轴运动模组***
光驱步进电机丝杆滑杆滑台
OpenCPU = 把单片机内核直接集成在通信模块内部,不用外加 MCU,直接在模块内部写代码、跑程序,不用外部主控
***电机教程***
Ardunio CNC电机扩展板+A4988电机驱动
XYZ三轴滑台模组
光驱改雕刻机
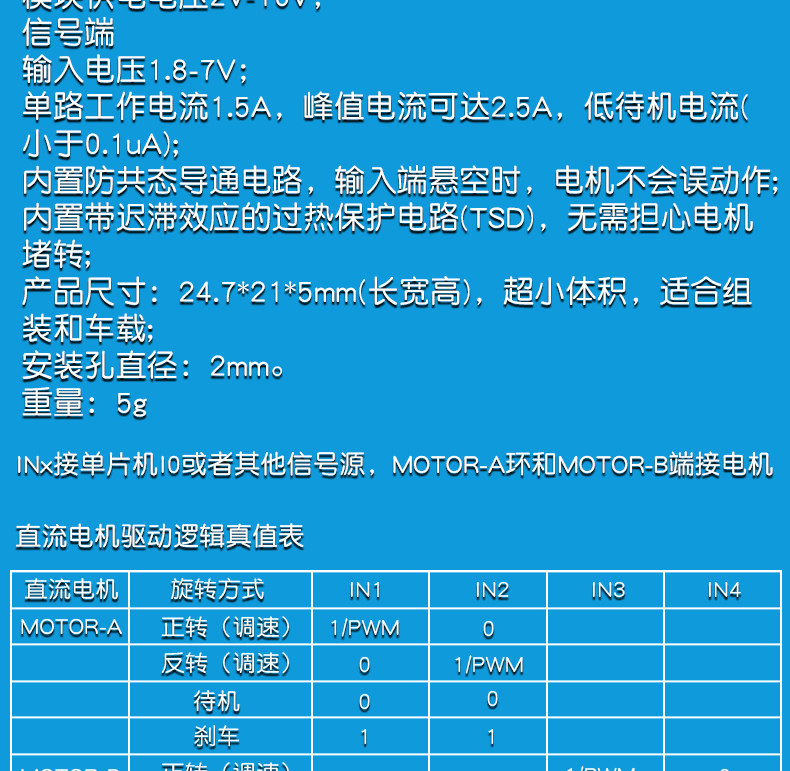
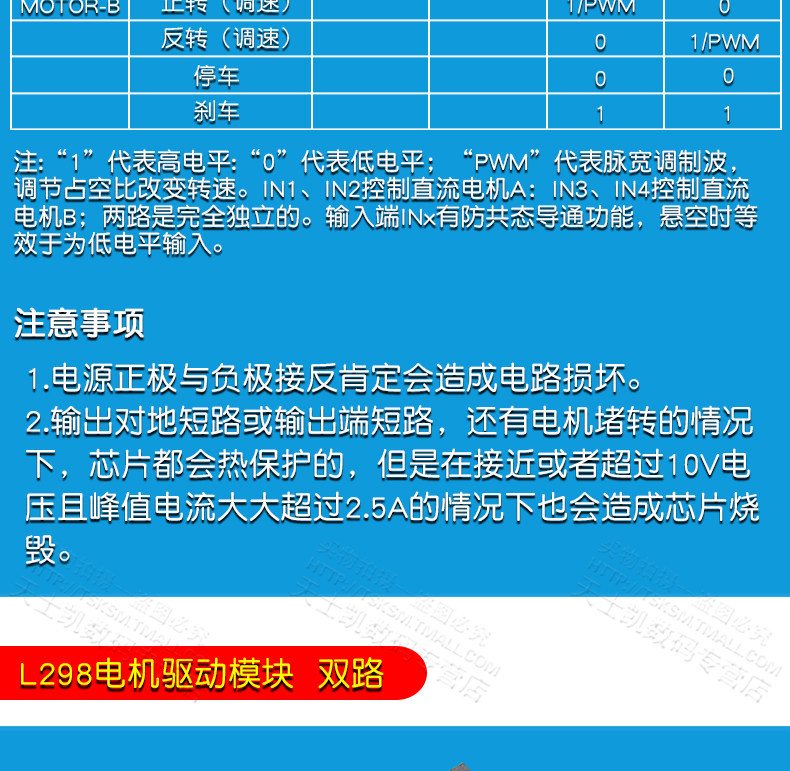
一般直流电机部分
步进电机部分 (细分就是把原来的一步又分为多步完成)步进电机驱动器
非严格伺服电机 (Ardunio常用舵机)
PLC 伺服电机及驱动器
电机常用传动方式
小型直流电动推杆电机大推力往复伸缩杆微型升降器推杆马达12V24V
步进电机基本参数
GA12-N20减速马达 智能小车3V6V12V微型直流齿轮减速电机低速电机
步进电机28BYJ4+ULN2003驱动板4相5线 5V12V步进电机减速电机模块
步进电机控制库AccelStepper
L298N驱动板驱动器模块步进电机直流电机微型小马达智能车机器人
丝杆导轨滑台
步进电机驱动器
GA12-N20减速马达 智能小车3V6V12V微型直流齿轮减速电机低速电机
电磁推拉杆
arduino-解决舵机与直流电机冲突问题
有刷电机无刷电机
步进电机与驱动
电机分类,舵机
托辊、轧辊、辊轮、滚轮都是什么及其区别
传送带滚轴托辊
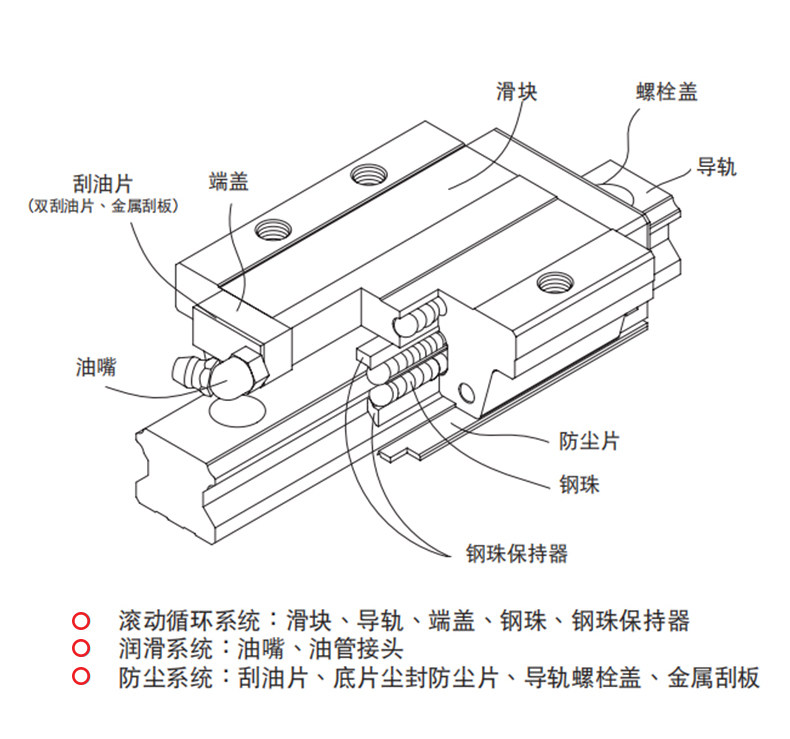
滚动导轨与滑动导轨,直线导轨,直线轴承
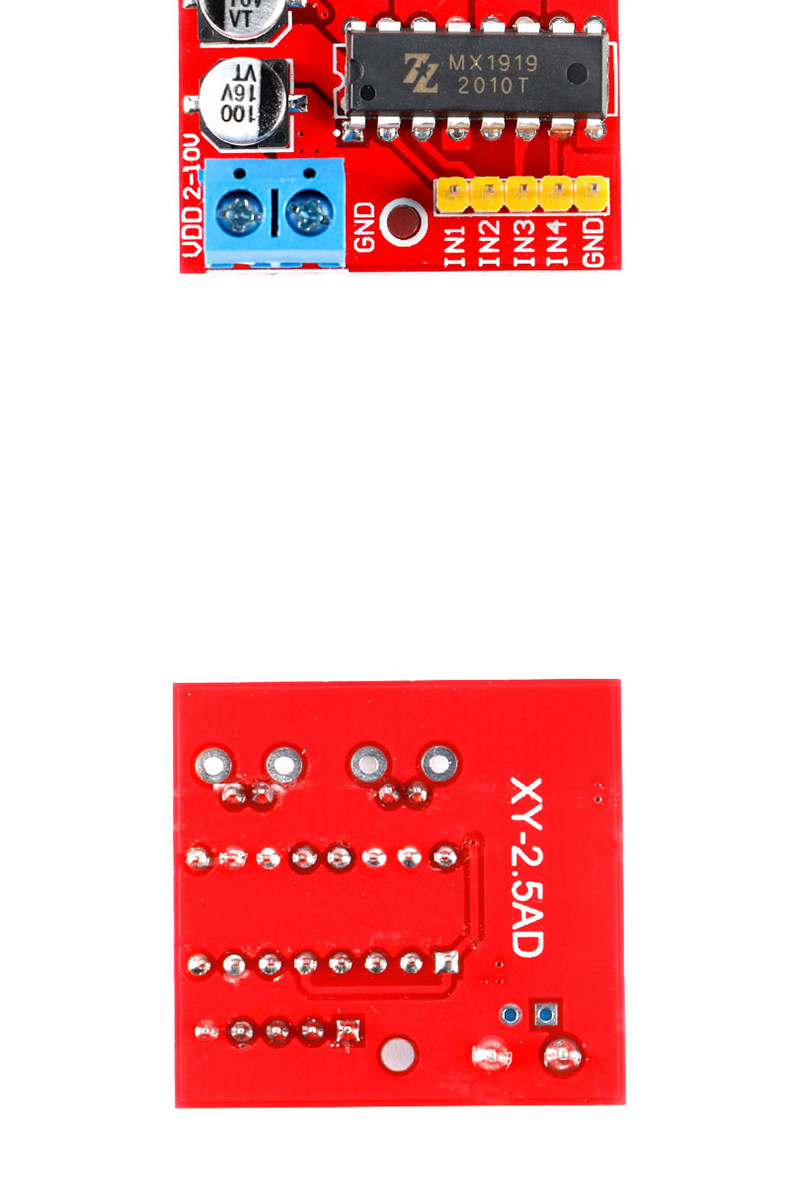
XY-2.5AD 2.5A双路电机驱动模块 正反转 PWM调速 双H桥替代L298N
步进电机28BYJ48+ULN2003驱动板 4相 5线 5V12V步进电机 减速电机
七星虫 42步进电机A4988驱动模块CNC V3雕刻机扩展板3D打印机配件 (A4988驱动板模块)
七星虫 L298N电机驱动板模块 步进电机模块 兼容arduino
轴承安装 控制轴向运动 轴承座
皮带传送机
三轴模组
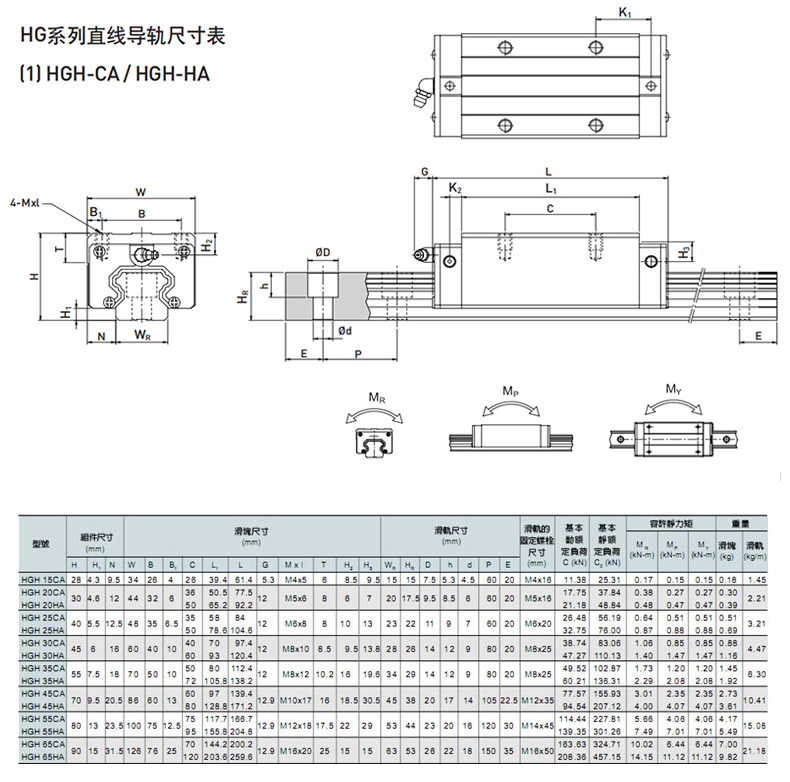
国产直线导轨滑块滑轨线轨HG15HG20HG25HG30 HG35 HG45
直线模组
arduino(2560)与步进电机驱动器连线
联轴器选择,轴承座组件
轴承的内径和轴的外径如何匹配
高电压 大功率MOS管 触发开关驱动模块 PWM调节电子开关控制板
打印XY轴,轴承,轴承座 销子
齿轮同步轮链轮,轴。轴承
万向节联轴器
国产导轨 滑块HGR15 20 25 30 35 45 线性导轨 高精度品质
电机联轴器
电机传动装置 丝杆 同步带 齿轮 链条 O带V带
弹夹式上料
自动化检测设备常见的上料方式有哪些
电磁锁代钥匙
四轴和六轴机器人的区别是什么
激光雕刻机
基于Arduino的桌面激光雕刻机
学习PWM引脚
一文看懂步进电机和舵机及伺服电机的区别
舵机和伺服电机有什么区别
机械臂关节伺服套装一体机
气动入门知识:气源三联件是什么,分别起什么作用
轴连接方式,轴套
如何通过脉冲控制步进电机与伺服电机的转速
变频器
变频器基础介绍
开源软件
微雕管家
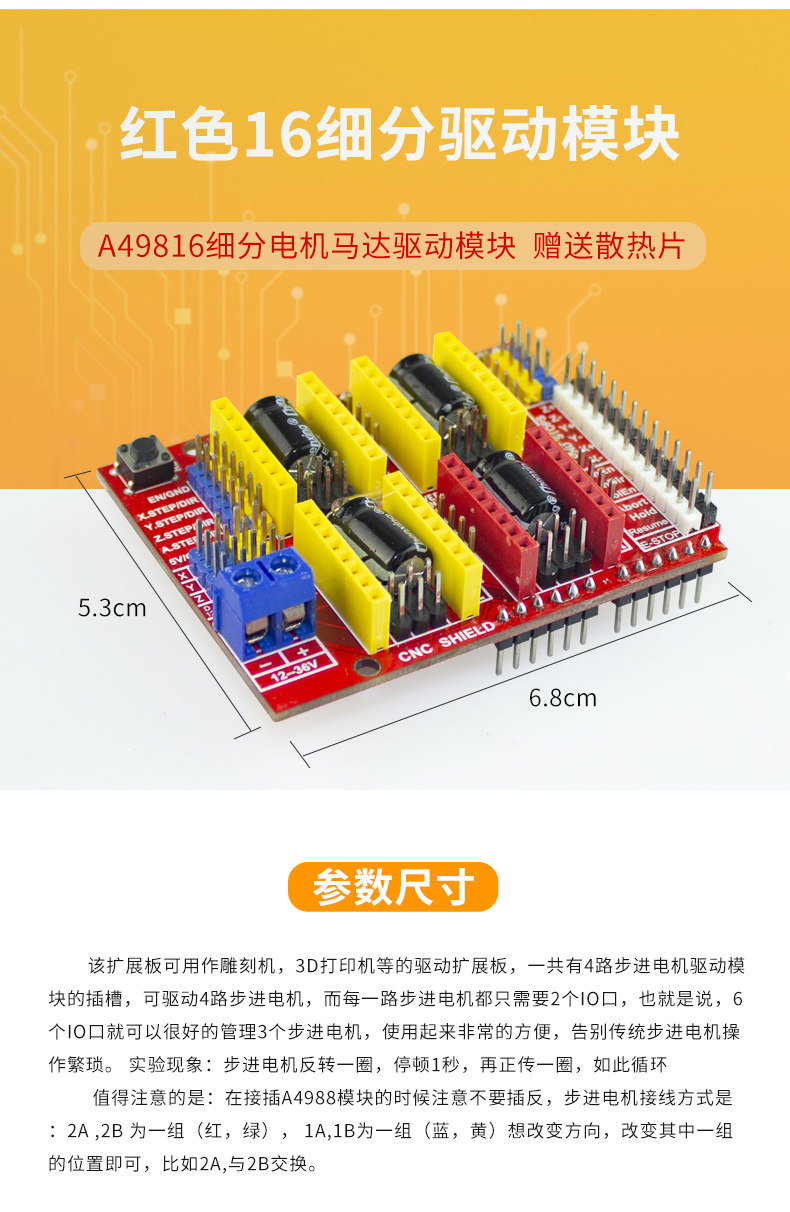
Ardunio CNC电机扩展板+A4988电机驱动
点击查看原文
将A4988安装到 CNC扩展板以后并且将其安装到Arduino Uno开发板上
上图中CNC电机扩展板装配有3个A4988驱动板。具体安装多少个A4988是根据您需要驱动步进电机数量来决定的。一台步进电机需要一个A4988。比如您需要驱动1个步进电机,那么只需要安装一个A4988就够了
电机步进模式设置
如下图所示,CNC扩展板的步进模式设置插针是用来设置电机步进模式的。通过向插针安装跳线帽,我们可以改变电机的步进模式。
每一个A4988接口上都有三组步进设置插针。这三组插针旁的电路板上印刷有M0/M1/M2。通过安置跳线帽,我们可以设置电机的步进模式。如下图所示,在Z端口上的M0无跳线/M1有跳线/M2无跳线。对应查找表格即可看到,当前Z端口上A4988驱动模式为1/4步进。
注:与单独使用A4988电机模块不同的是,我们只能使用CNC扩展板上的“步进设置跳线”来控制电机的步进模式。
外接直流电源
Arduino CNC电机扩展板上配有外接直流电源接口。该接口允许接入的电压范围是12V~36V。具体应该连接多大的电源电压是根据被驱动的电机工作电压所决定的。如果您使用的电机是NEMA17步进电机(42步进电机),通常该电机的工作电压是12伏特,那么您可以为扩展板配一个12伏特的外接电源。另外请注意:千万不要将电源的正负极接反,否则可能会对电路板造成损坏。
如下图所示,我们可以用小改锥顺时针旋转外接电源接口上的螺钉来固定电源引线。若想移除引线,只要逆时针旋转螺钉就可以了。
请注意:CNC扩展板的外接电源是无法为Arduino开发板供电的。因此在使用CNC扩展板时,您需要为Arduino单独提供一个电源。假如您不知道如何来为Arduino提供电源的话,可以点击这里了解几种常用的为Arduino供电方法 。
用于控制电机的Arduino引脚
使用Arduino驱动CNC扩展板需要了解各引脚的具体控制功能。在以下说明图中,我们将Arduino各个引脚与CNC扩展板上印刷的标识文字一一对应,另外在下图后面还用文字对引脚功能进行说明。这些都是为了便于您参考使用。
Arduino引脚 8 ———————– CNC 扩展板 EN ( 所有电机驱动板使能引脚/低电平有效 )
Arduino引脚 5 ———————– CNC 扩展板 X.DIR ( X端口方向控制引脚)
Arduino引脚 2 ———————– CNC 扩展板 X.STEP ( X端口步进控制引脚)
Arduino引脚 6 ———————– CNC 扩展板 Y.DIR ( Y端口方向控制引脚)
Arduino引脚 3 ———————– CNC 扩展板 Y.STEP ( Y端口步进控制引脚)
Arduino引脚 7 ———————– CNC 扩展板 Z.DIR ( Z端口方向控制引脚)
Arduino引脚 4 ———————– CNC 扩展板 Z.STEP ( Z端口步进控制引脚)
Arduino引脚 13 ———————– CNC 扩展板 A.DIR ( A端口方向控制引脚)
Arduino引脚 12 ———————– CNC 扩展板 A.STEP ( A端口步进控制引脚)
请注意:
1. 以上列表仅列出了用于控制电机的Arduino引脚。有关其它引脚介绍,请参考本教程页面的其它引脚说明 部分。
2. 要使用CNC扩展板的A端口来控制步进电机,您必须先对扩展板进行额外设置。如果您想了解这一知识内容的具体信息,请参考本教程页面的使用端口A驱动电机部分 。
Arduino CNC扩展板驱动1个NEMA步进电机(42步进电机)电路连接
Arduino CNC扩展板驱动1个NEMA步进电机(42步进电机)示例程序
本示例程序旨在演示如何使用Arduino Uno开发板通过Arduino CNC电机扩展板来驱动NEMA17步进电机(42步进电机)。本示例程序将用到AccelStepper库,如果您对该库不太了解,请点击这里进入我们制作的AccelStepper库教程页面 。
/*
Arduino CNC电机扩展板驱动NEMA17步进电机示例程序-1
By 太极创客(http://www.taichi-maker.com)
2019-03-10
本示例程序旨在演示如何使用Arduino Uno开发板通过Arduino CNC电机扩展板来驱动NEMA17步进电机(42步进电机)。
如需获得更多关于本示例程序的电路连接以及CNC电机扩展板的资料信息,
请参考太极创客网站(http://www.taichi-maker.com),并在首页搜索栏中搜索关键字:CNC扩展板
*/
#include <AccelStepper.h> //本示例程序使用AccelStepper库
// 定义电机控制用常量
// A4988连接Arduino引脚号
const int xdirPin = 5; // 方向控制引脚
const int xstepPin = 2; // 步进控制引脚
const int xenablePin = 8; // 使能控制引脚
const int moveSteps = 200; //运行步数
AccelStepper stepper1(1,xstepPin,xdirPin);//建立步进电机对象
void setup() {
pinMode(xstepPin,OUTPUT); // Arduino控制A4988步进引脚为输出模式
pinMode(xdirPin,OUTPUT); // Arduino控制A4988方向引脚为输出模式
pinMode(xenablePin,OUTPUT); // Arduino控制A4988使能引脚为输出模式
digitalWrite(xenablePin,LOW); // 将使能控制引脚设置为低电平从而让
// 电机驱动板进入工作状态
stepper1.setMaxSpeed(300.0); // 设置电机最大速度300
stepper1.setAcceleration(20.0); // 设置电机加速度20.0
}
void loop() {
// 控制步进电机往复运动
if ( stepper1.currentPosition() == 0 ){
stepper1.moveTo(moveSteps);
} else if ( stepper1.currentPosition() == moveSteps ){
stepper1.moveTo(0);
}
stepper1.run(); // 1号电机运行
}
Arduino CNC扩展板驱动3个NEMA步进电机(42步进电机)示例程序
本示例程序旨在演示如何使用Arduino Uno开发板通过Arduino CNC电机扩展板来驱动3个NEMA17步进电机(42步进电机)。本示例程序将用到AccelStepper库,如果您对该库不太了解,请点击这里进入我们制作的AccelStepper库教程页面 。
/*
Arduino CNC电机扩展板驱动3个NEMA17步进电机示例程序
By 太极创客(http://www.taichi-maker.com)
2019-03-10
本示例程序旨在演示如何使用Arduino Uno开发板通过Arduino CNC电机扩展板来驱动3个NEMA17步进电机。
如需获得更多关于本示例程序的电路连接以及CNC电机扩展板的资料信息,
请参考太极创客网站(http://www.taichi-maker.com),并在首页搜索栏中搜索关键字:CNC扩展板
*/
#include <AccelStepper.h> //本示例程序使用AccelStepper库
// 定义电机控制用常量
const int enablePin = 8; // 使能控制引脚
const int xdirPin = 5; // x方向控制引脚
const int xstepPin = 2; // x步进控制引脚
const int ydirPin = 6; // y方向控制引脚
const int ystepPin = 3; // y步进控制引脚
const int zdirPin = 7; // z方向控制引脚
const int zstepPin = 4; // z步进控制引脚
const int moveSteps = 200; //测试电机运行使用的运行步数
AccelStepper stepper1(1,xstepPin,xdirPin);//建立步进电机对象1
AccelStepper stepper2(1,ystepPin,ydirPin);//建立步进电机对象2
AccelStepper stepper3(1,zstepPin,zdirPin);//建立步进电机对象3
void setup() {
pinMode(xstepPin,OUTPUT); // Arduino控制A4988x步进引脚为输出模式
pinMode(xdirPin,OUTPUT); // Arduino控制A4988x方向引脚为输出模式
pinMode(ystepPin,OUTPUT); // Arduino控制A4988y步进引脚为输出模式
pinMode(ydirPin,OUTPUT); // Arduino控制A4988y方向引脚为输出模式
pinMode(zstepPin,OUTPUT); // Arduino控制A4988z步进引脚为输出模式
pinMode(zdirPin,OUTPUT); // Arduino控制A4988z方向引脚为输出模式
pinMode(enablePin,OUTPUT); // Arduino控制A4988使能引脚为输出模式
digitalWrite(enablePin,LOW); // 将使能控制引脚设置为低电平从而让
// 电机驱动板进入工作状态
stepper1.setMaxSpeed(300.0); // 设置电机最大速度300
stepper1.setAcceleration(20.0); // 设置电机加速度20.0
stepper2.setMaxSpeed(300.0); // 设置电机最大速度300
stepper2.setAcceleration(20.0); // 设置电机加速度20.0
stepper3.setMaxSpeed(300.0); // 设置电机最大速度300
stepper3.setAcceleration(20.0); // 设置电机加速度20.0
}
void loop() {
// 控制步进电机1往复运动
if ( stepper1.currentPosition() == 0 ){
stepper1.moveTo(moveSteps);
} else if ( stepper1.currentPosition() == moveSteps ){
stepper1.moveTo(0);
}
// 控制步进电机2往复运动
if ( stepper2.currentPosition() == 0 ){
stepper2.moveTo(moveSteps/2);
} else if ( stepper2.currentPosition() == moveSteps/2 ){
stepper2.moveTo(0);
}
// 控制步进电机3往复运动
if ( stepper3.currentPosition() == 0 ){
stepper3.moveTo(moveSteps/4);
} else if ( stepper3.currentPosition() == moveSteps/4 ){
stepper3.moveTo(0);
}
stepper1.run(); // 1号电机运行
stepper2.run(); // 2号电机运行
stepper3.run(); // 3号电机运行
}
一般直流电机部分
130直流电机
一般直流电机控制模块XY-2.5AD
减速电机(驱动力强一般电机+减速机构),一般电机
PWM写入analogWrite
转速由 PWM决定
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
// 以50%的占空比运行电机,使电机以中等速度旋转
analogWrite(motorPin, 128);
delay(1000);
// 以20%的占空比运行电机,使电机慢速旋转
analogWrite(motorPin, 51);
delay(1000);
// 以80%的占空比运行电机,使电机快速旋转
analogWrite(motorPin, 204);
delay(1000);
}
占空比与速度关系:占空比越高,电机两端的平均电压越高,电机旋转速度越快;占空比越低,电机两端的平均电压越低,电机旋转速度越慢。例如,占空比为 0% 时,电机不转;占空比为 100% 时,电机以最快速度旋转。
Arduino 的占空比如何计算
1 .一个 PWM 信号周期是 10ms,如果高电平持续时间是 6ms,那么占空比 =(6ms/10ms)×100% = 60%。
2. 与 Arduino 函数的联系
在 Arduino 编程中,使用analogWrite()函数来控制 PWM 输出。这个函数有两个参数,第一个参数是引脚号,第二个参数是一个 0 - 255 之间的值。
当使用analogWrite()函数时,Arduino 会自动将 0 - 255 这个值映射到占空比。对于大多数 Arduino 板,如 Uno,其 PWM 频率大约是 490Hz 左右(不同的 Arduino 板可能会有所不同)。
计算方式如下:占空比 =(analogWrite()函数的第二个参数 / 255)×100%。
例如,如果analogWrite(pin, 128),那么占空比 =(128/255)×100%≈50.2%
步进电机部分
七星虫 42 步进电机的不同步进模式,是指控制电机转动时,电机转子每次转动的角度不同,具体如下
全步进模式
原理:全步进模式又可细分为单相全步进驱动和双相全步进驱动两种.
单相全步进驱动:绕组按 ab/cd/ba/dc 的顺序加电,其中 ba 表示绕组 ab 的加电是反方向进行的,在任何一个时间,只有一相加电.
双相全步进驱动:双相一起加电,因此转子总是在两个极之间,这一模式是两极电机的常态驱动顺序,可输出的扭矩最大.
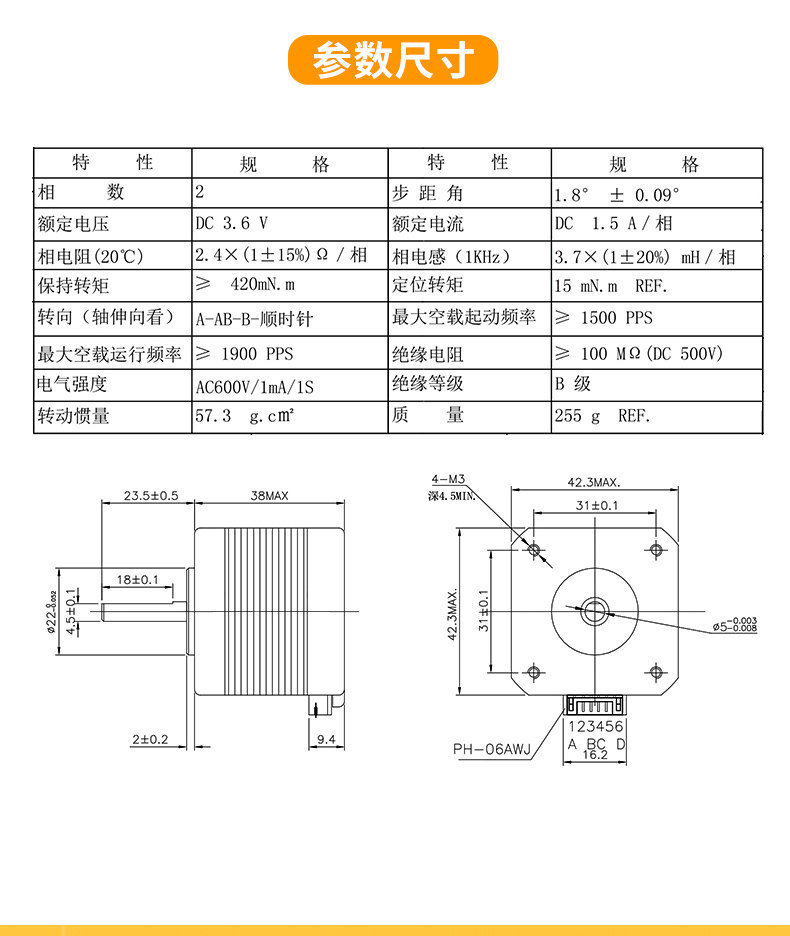
步距角:对于常见的 42 步进电机,若其步距角为 1.8°
1/2 步进模式
原理:将单相步进和双相步进结合在一起加电,即单相加电,然后双相加电,然后单相加电……,使电机以半步进增量运转.
步距角:步距角是全步进模式的一半,若全步进模式下电机步距角为 1.8°,则 1/2 步进模式下电机每步旋转的角度为 0.9°,从而实现更高的精度控制行程.
1/4 步进模式
原理:通过对电机绕组通电顺序的更精细控制,将一个完整的步距角进一步细分为四等份,使得电机每次转动的角度更小,控制精度更高 。
步距角:电机每接收到一个脉冲信号,转动的角度为全步进模式下步距角的 1/4,即 0.45°。如在一些需要高精度定位的设备中,如 3D 打印机、CNC 雕刻机等,使用 1/4 步进模式可以使打印或雕刻的精度更高.
1/8 步进模式
原理:把全步进模式的步距角再细分,使电机的转动角度更小,控制更加精确。
步距角:此时电机每步转动的角度为全步进模式步距角的 1/8,也就是 0.225°。在对精度要求极高的应用场景中,如一些精密仪器的制造、光学设备的调整等,1/8 步进模式能够更好地满足需求.
1/16 步进模式
原理:对全步进模式的步距角进行十六等分,实现更微小的角度控制。
步距角:电机每接收到一个脉冲信号,其转子转动的角度为全步进模式步距角的 1/16,即 0.1125°。这种模式通常用于对精度和控制分辨率要求极高的特殊场合,如航空航天领域的某些设备、高端科研仪器等
为何叫42步进电机
42 步进电机的名称来源于其安装机座尺寸,通常指的是机座的边长为 42mm 的正方形,其外径约为 42mm×42mm,故而得名.
如何控制步进电机转速
步进电机是一种将电脉冲信号转换为角位移或线位移的电机。每接收一个脉冲信号,电机就会按照固定的步距角转动。要控制其转速,本质上是控制单位时间内输入脉冲的数量。
使用delay()函数实现简单控制(基础方法),
步进电机的速度与输入脉冲的频率直接相关。脉冲频率越高,电机转速越快;脉冲频率越低,电机转速越慢 。
假设使用一个简单的四相步进电机,并且已经正确连接到 Arduino 的四个引脚(例如,引脚 2、3、4、5)。以下是一个全步模式下控制电机转速的示例代码:
const int dirPin = 3;
void setup() {
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
digitalWrite(dirPin, LOW); // 设置电机旋转方向,LOW为一个方向,HIGH为相反方向
}
void loop() {
digitalWrite(stepPin, HIGH);
delay(5); // 控制脉冲宽度,这里的延迟时间影响转速,延迟时间越短,转速越快
digitalWrite(stepPin, LOW);
delay(5);
}
原理说明
在这个示例中,stepPin用于发送脉冲信号,dirPin用于控制电机的旋转方向。在loop函数中,首先将stepPin设置为高电平,然后通过delay(5)函数暂停 5 毫秒,这就产生了一个脉冲的上升沿。接着将stepPin设置为低电平,再延迟 5 毫秒,产生一个脉冲的下降沿。这样就完成了一个脉冲的发送。
电机的转速取决于脉冲的频率,而脉冲频率与delay函数中的延迟时间有关。延迟时间越短,单位时间内发送的脉冲数量越多,电机转速就越快。例如,如果将延迟时间都改为 2 毫秒,电机转速就会比延迟 5 毫秒时快。
步进电机(特殊直流电机):可以精确输出轴角度 低速运行时候更高的扭矩 开环控制性价比高
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,广泛应用于3D打印,机器人开发等领域。这里我们着重介绍的步进电机是NEMA17(42步进电机)以及28BYJ-48步进电机。这两种电机相对创客制作来说是最流行的两款步进电机。
七星虫 42步进电机A4988驱动模块CNC V3雕刻机扩展板3D打印机配件
转速由脉冲间隔和脉冲宽度决定
A4988控制步进电机
// 定义电机控制用常量
// A4988连接Arduino引脚号
const int dirPin = 2; // 方向引脚
const int stepPin = 3; // 步进引脚
// 电机每圈步数
const int STEPS_PER_REV = 200;
void setup() {
// Arduino控制A4988步进和方向的引脚为输出模式
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
}
void loop() {
// 设置电机顺时针旋转
digitalWrite(dirPin,LOW);
// 电机慢速旋转
for(int x = 0; x < STEPS_PER_REV; x++) {
digitalWrite(stepPin,HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin,LOW);
delayMicroseconds(2000);
}
// 等待一秒
delay(1000);
// 设置电机逆时针旋转
digitalWrite(dirPin,HIGH);
// 电机快速旋转
for(int x = 0; x < (STEPS_PER_REV * 2); x++) {
digitalWrite(stepPin,HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin,LOW);
delayMicroseconds(1000);
}
// 等待一秒
delay(1000);
}
冷却系统–散热器
A4988驱动器IC的过多功耗会导致温度上升,该温度上升可能超出IC的容量,可能会损坏自身。
即使A4988驱动器IC每个线圈的最大额定电流为2A,该芯片也只能为每个线圈提供大约1A的电流而不会过热。
为了使每个线圈达到1A以上,需要使用散热器或其他冷却方法。
A4988驱动器通常带有散热器。建议您在使用驱动程序之前先安装它。
限流
在使用电动机之前,需要进行一些小的调整。我们需要限制流经步进线圈的最大电流,并防止其超过电机的额定电流。
A4988驱动器上有一个微调电位器,可用于设置电流限制。您应将电流限制设置为等于或小于电动机的额定电流。
要进行此调整,有两种方法:
方法1:
在这种方法中,我们将通过测量“ ref”引脚上的电压(Vref)来设置电流限制。
查看您的步进电机的数据表。记下它的额定电流。在我们的情况下,我们使用NEMA 17 200steps / rev,12V 350mA。
断开三个微步选择引脚,使驱动器进入全步模式。
不给STEP输入计时,将电动机固定在固定位置。
调整时,请测量金属微调电位器本身的电压(Vref)。
使用公式调整Vref电压电流限制= Vref x 2.5
例如,如果电动机的额定电流为350mA,则可以将参考电压调整为0.14V。
提示:一种简单的调整方法是在金属螺丝刀的轴上使用一个鳄鱼夹,然后将其固定在万用表上,以便您可以同时使用螺丝刀测量和调整电压。
方法2:
在这种方法中,我们将通过测量流经线圈的电流来设置电流极限。
查看您的步进电机的数据表。记下它的额定电流。在我们的情况下,我们使用NEMA 17 200steps / rev,12V 350mA。
断开三个微步选择引脚,使驱动器进入全步模式。
不给STEP输入计时,将电动机固定在固定位置。不要将STEP输入悬空,将其连接到逻辑电源(5V)
将电流表与步进电机上的线圈之一串联,然后测量实际电流。
拿起一把小螺丝刀,调节电流限制电位器,直到达到额定电流。
如果更改逻辑电压(VDD),则需要再次执行此调整
用Arduino UNO接线A4988步进电机驱动器
现在我们了解了有关驱动程序的所有知识,我们将其连接到我们的Arduino。
连接非常简单。首先将VDD和GND(VDD旁边)连接到Arduino的5V和接地引脚。DIR和STEP输入引脚分别连接到Arduino上的#2和#3数字输出引脚。
将步进电机连接到2B,2A,1A和1B引脚。实际上,A4988的布局很方便,可以与几台双极电机上的4针连接器匹配,因此这不是问题。
警告:驱动器通电时连接或断开步进电机会损坏驱动器。
接下来,将RST引脚连接到相邻的SLP / SLEEP引脚以保持驱动器使能。还要保持微步选择引脚断开,以使电机以全步模式运行。
最后,将电动机电源连接到VMOT和GND引脚。请记住,在靠近电路板的电动机电源引脚之间放置一个较大的100pF去耦电解电容。
A4988控制42步进电机
MS1 , MS2 , MS3 跳线说明:(例子里是低电平,悬空或接地线,使用全步进模式)
分别是全步进,1/2步进,1/4步进,1/8步进,1/16步进模式。
步进电机走一步是1.8度,一圈就是200步。例如使用1/16步进,则需要走3200步才等于一圈。
ms1 ms2 ms3
L L L 整步(没有细分)
H L L 1/2(2细分)
L H L 1/4(4细分)
H H L 1/8(8细分)
H H H 1/16(16细分)
测试程序程序:
int x;
void setup()
{
pinMode(6,OUTPUT); // Enable: EN可以使用单片机端口控制,也可以直接连接GND使能
pinMode(5,OUTPUT); // steps:脉冲个数
pinMode(4,OUTPUT); // dir:为方向控制
digitalWrite(6,LOW); // Set Enable low
}
void loop()
{
digitalWrite(4,HIGH); // Set Dir high
for(x = 0; x < 200; x++) // Loop 200 times
{
digitalWrite(5,HIGH); // Output high
delayMicroseconds(800); // Wait 1/2 a ms
digitalWrite(5,LOW); // Output low
delayMicroseconds(800); // Wait 1/2 a ms
}
delay(1000); // pause one second
digitalWrite(4,LOW); // Set Dir low
for(x = 0; x < 200; x++) // Loop 2000 times
{
digitalWrite(5,HIGH); // Output high
delayMicroseconds(800); // Wait 1/2 a ms
digitalWrite(5,LOW); // Output low
delayMicroseconds(800); // Wait 1/2 a ms
}
delay(1000); // pause one second
}
ps后记学习:
*脚6(-en) 低电平为启动电机(enable),貌似也可以不接,试过一样能运行.但如果要控制电机的启动关闭还是要用上
*脚4(-dir) 用高低电平控制方向.
*脚5(-step) 用高低电平驱动电机转动.注意中间间隔等待的微秒值,如果太快会导致电机有声响不转动.
http://www.geek-workshop.com/thread-9397-1-1.html
int dirPin = 8;
int stepperPin = 7;
void setup() {
pinMode(dirPin, OUTPUT);
pinMode(stepperPin, OUTPUT);
}
void step(boolean dir,int steps){
digitalWrite(dirPin,dir);
delay(50);
for(int i=0;i<steps;i++){
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800);
}
}
void loop(){
step(true,1600);
delay(500);
step(false,1600*5);
delay(500);
}
void setup() {
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
}
void loop() {
digitalWrite(9, HIGH);
delay(1);
digitalWrite(9, LOW);
delay(1);
}
步进电机型号
1、步进电机到底有多少型号?
答:28.42.57.86.110.130.
2、这些数字是代表电机尺寸大小吗?
答:这些型号根据电机的底座的直径来命名的。
3、除了BYG还有哪些英文型号,分别代表什么意思?
答:现在用的比较多的都是混合式步进电机了。而且现在这种东西已经国产化了。各个厂家的命名又有所不同。所以不能给你提供更好的解释。
步进电机的基本参数
1、电机固有步距角
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,这个步距角可以称之为“电机固有步距角”,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
2、步进电机的相数
步进电机的相数是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,则“相数”将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
3、保持转矩(HOLDINGTORQUE)
保持转矩是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
4、钳制转矩(DETENTTORQUE)
钳制转矩是指步进电机没有通电的情况下,定子锁住转子的力矩。由于反应式步进电机的转子不是永磁材料,所以它没有DETENTTORQUE。
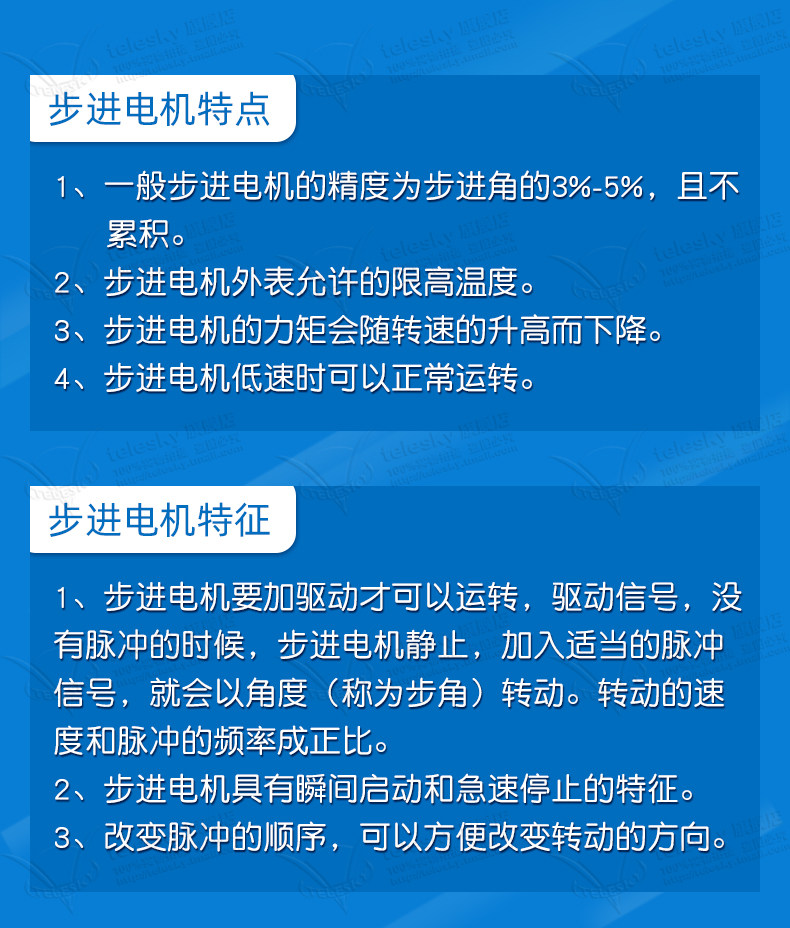
步进电机的特点
1、一般步进电机的精度为步进角的3-5%,且不累积。
2、步进电机外表允许的最高温度取决于不同电机磁性材料的退磁点。步进电机温度过高时会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
3、步进电机的力矩会随转速的升高而下降。当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
4、步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
步进电机的优点
1、电机旋转的角度正比于脉冲数;
2、电机停转的时候具有最大的转矩(当绕组激磁时);
3、由于每步的精度在百分之三到百分之五,而且不会将一步的误差积累到下一步因而有较好的位置精度和运动的重复性;
4、优秀的起停和反转响应;
5、由于没有电刷,可靠性较高,因此电机的寿命仅仅取决于轴承的寿命;
6、电机的响应仅由数字输入脉冲确定,因而可以采用开环控制,这使得电机的结构可以比较简单而且控制成本;
7、仅仅将负载直接连接到电机的转轴上也可以极低速的同步旋转;
8、由于速度正比于脉冲频率,因而有比较宽的转速范围。
步进电机的缺陷
1、如果控制不当容易产生共振;
2、难以运转到较高的转速;
3、难以获得较大的转矩;
4、在体积重量方面没有优势,能源利用率低;
5、超过负载时会破坏同步,高速工作时会发出振动和噪声。
如何选择步进电机
1、步距角的选择
电机的步距角取决于负载精度的要求,将负载的最小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度 (三相电机)等。
2、静力矩的选择
步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)。
3、电流的选择
静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特性曲线图,判断电机的电流。
选用步进电机时应注意以下几点
1、一般应选用力矩比实际需要大百分之五十到百分之百的步进电机,因为步进电机不能过负载运行,即便是瞬间过载都可能造成失步、停转或不规则原地来回作动。
2、上位控制器输入的脉冲电流必须够大(一般要》10mA),以确保光电耦合器稳定导通,否则会导致步进电机失步;如果输入脉冲频率过高,会因个别脉冲接收不到,导致步进电机失步。
3、启动频率不应太高,应在启动程序中设置加速过程,即从规定的启动频率开始,加速到设定频率,否则就可能不稳定,甚至处于惰态。
4、电机如果未固定好,造成强烈共振,也会导致步进电机失步。
5、应了解步进电机的固有弱点:输入脉冲频率过高,易导致丢步;输入脉冲频率过低,易出现共振;转速偏高时扭矩降低明显。
6、应了解最新型步进电机的性能,必要时选用采用了最新控制技术的高级步进电机系统,高级系统既可以使步进电机在高速状态下减少共振,还能运用减少步进电机反电动势的技术,增加电机在高速状态下的扭矩。
步进电机失步的原因很多。在实际应用过程中,有必要采用消除法进行逐一分析,找出造成失步的真正原因。 通常,步进电动机失步的原因有以下几种:
1.步进电动机本身的工作转矩不足,没有足够的能力来驱动负载;
2.步进电机的启动和停止加减速过程不足,步进电机在加减速过程中失步;
3.步进电机的功率不足以导致步进电机的输入功率不足以导致步进;
4.步进电机驱动器电压不足或驱动器电流设置过低;
5.驱动程序或控制器受到信号干扰;
6.步进电动机系统的共振会导致步进电动机的负载能力降低;
7.驱动器和控制器的信号不匹配;
8.同步轮或齿轮箱的反冲或来回。
非严格伺服电机(Ardunio常用舵机):闭环控制
舵机通常通过脉冲宽度来控制角度
舵机的转动角度相关参数主要有以下几个 :
PWM 信号参数
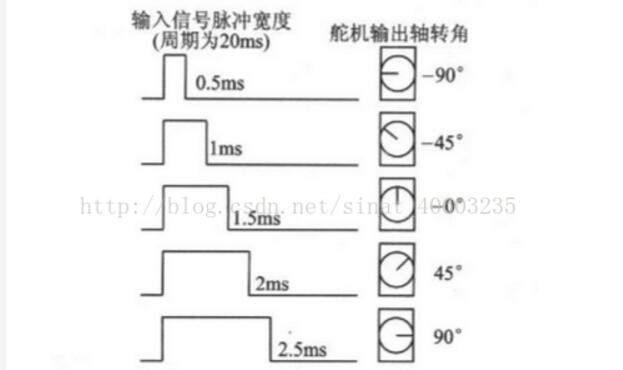
时基脉冲周期 :一般为 20ms 左右,这是舵机控制信号的基本周期,通过在这个周期内改变高电平的持续时间来控制舵机的转动角度.
角度控制脉冲宽度:在 20ms 的时基脉冲中,高电平部分的宽度通常在 0.5ms-2.5ms 范围内变化,用于控制舵机的转动角度。例如,对于常见的 180° 舵机,0.5ms 对应的转动角度为 0°,1.0ms 对应的转动角度为 45°,1.5ms 对应的转动角度为 90°,2.0ms 对应的转动角度为 135°,2.5ms 对应的转动角度为 180°.
最大转动角度
常见的有 180° 舵机和 360° 舵机。180° 舵机的转动范围在 0°-180° 之间,适用于需要在一定角度范围内精确控制的场合,如机器人关节的角度控制。360° 舵机则可以像普通电机一样连续旋转,主要用于控制方向和转速,但无法像 180° 舵机那样精确控制转动角度,常用于需要连续旋转的装置,如机器人的轮子转动等.
中间位置脉冲宽度 **:
不同舵机的最大转动角度可能不同,但中间位置的脉冲宽度是一定的,一般为 1.5ms,该脉冲宽度对应的是舵机转动范围的中间角度,如 180° 舵机的 90° 位置.
分辨率
指舵机能够分辨的最小角度变化,通常取决于控制信号的精度和舵机内部的机械结构及传感器精度等因素 。一些高精度的舵机配备了高分辨率的传感器,如 MT6701 机器人舵机磁编码器,其分辨率最高可达 16 位,角度精度可达 ±0.1°.
响应速度
表示舵机从接收到控制信号到开始转动并达到目标角度的快慢程度,与舵机的电机性能、传动机构效率以及控制算法等有关。例如,MT6701 机器人舵机磁编码器的响应速度最高可达 20kHz,能够快速响应控制信号,实现精确的角度控制.
舵机自定义函数控制
//控制舵机
void initServo(int ServoPin)
{
turnAngle = 90;
pinMode(ServoPin, OUTPUT);
digitalWrite(ServoPin, LOW);//先保证拉低
//ServoControl(12, 0);
}
long xnmap(long x, long in_min, long in_max, long out_min, long out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
void ServoControl(int ServoPin, int servoAngle)
{
double thisAngle = xnmap(servoAngle, 0, 180, 500, 2500);//等比例角度值范围转换高电平持续时间范围
unsigned char i = 50;//50Hz 每秒的周期次数(周期/秒) 即1S 50 个周期 每个周期20ms 保证脉冲持续转到位
while (i--)//保证脉冲持续转到位
{
digitalWrite(ServoPin, HIGH);
delayMicroseconds(thisAngle); //高电平时间
digitalWrite(ServoPin, LOW);
delayMicroseconds(20000 - thisAngle);//每个周期20ms减去高电平持续时间
}
}
使用 map (x, in_min, in_max, out_min, out_max) 函数将模拟输入数值(0 - 1023)等比映射到模拟输出数值区间(0-180)内
map(val,0,1023,0,180);
在 Arduino 中,map()函数用于将一个数从一个范围映射到另一个范围。它的语法是map(value, fromLow, fromHigh, toLow, toHigh)。
其中,value是要映射的原始值,fromLow和fromHigh是原始值的范围下限和上限,toLow和toHigh是目标范围的下限和上限。
角度映射 :
伺服电机通常通过脉冲宽度来控制角度。例如,对于一个常见的 180° 伺服电机,其脉冲宽度范围可能是从 1000 微秒到 2000 微秒,对应的角度范围是 0° 到 180°。
假设我们有一个变量angle,它的值是我们期望伺服电机转动到的角度(范围是 0 - 180),我们需要将这个角度值映射到对应的脉冲宽度(1000 - 2000 微秒)。这时就可以使用map()函数,如pulseWidth = map(angle, 0, 180, 1000, 2000)。这样,当angle为 0 时,pulseWidth会被计算为 1000 微秒;当angle为 180 时,pulseWidth会被计算为 2000 微秒。
速度或其他参数映射(如果适用) :
有些高级的伺服电机可能支持速度控制或者其他参数控制。例如,速度可能用一个 0 - 255 的数值来表示(这只是假设情况),但实际控制信号可能是一个不同的范围,比如 0 - 100。同样可以使用map()函数来将 0 - 255 的速度值映射到 0 - 100 的控制信号范围。
工作原理和计算过程
计算方式是通过一个线性映射公式。首先计算原始值value在原始范围fromLow到fromHigh中的比例,公式为proportion=(value - fromLow)/(fromHigh - fromLow)。
然后将这个比例应用到目标范围toLow到toHigh中,得到映射后的值mappedValue = toLow+(proportion*(toHigh - toLow))。
例如,map(50, 0, 100, 0, 200):
首先计算比例:proportion=(50 - 0)/(100 - 0)=0.5。
然后计算映射后的值:mappedValue = 0+(0.5*(200 - 0)) = 100。
示例代码
以下是一个完整的 Arduino 代码示例,用于控制一个伺服电机的角度:
cpp
#include <Servo.h>
Servo myservo;
int angle = 90;
void setup() {
myservo.attach(9); // 将伺服电机连接到数字引脚9
}
void loop() {
int pulseWidth = map(angle, 0, 180, 1000, 2000);
myservo.writeMicroseconds(pulseWidth);
delay(1000);
angle = 135;
pulseWidth = map(angle, 0, 180, 1000, 2000);
myservo.writeMicroseconds(pulseWidth);
delay(1000);
}
在这个示例中,首先定义了一个Servo对象myservo,并在setup函数中将其连接到数字引脚 9。在loop函数中,通过map()函数将角度angle映射到对应的脉冲宽度pulseWidth,然后使用myservo.writeMicroseconds(pulseWidth)函数将脉冲宽度发送给伺服电机,控制电机转动到相应的角度,每次转动后延迟 1000 毫秒。
或使用舵机控制库Servo
Servo库文件使用
我们知道舵机必须定期接收高电平脉冲控制信号才能维持转动。如果信号停止,舵机也停止。详见:舵机角度的控制。如果使用servo库来设置控制信号,就可以通过引入一些代码,实现如延迟、检查传感器、等待等功能。同时,由于servo库一直在后台运行,而舵机一直在旋转,它会经常中断其他正在执行的代码来启动那些高脉冲,带是这个切换的动作快到我们感知不到。
使用servo库来发送舵机控制信号一般需要四个步骤:
1、 首先要告诉Arduino编程器,希望在代码开始时,即setup函数之前,声明使用Servo库函数。
#include <Servo.h> // Include servo library
2、 在#include和setup函数之间为要发送的信号命名servo库的实例。如下servoLeft就是指定的实例名称。
Servo servoLeft; // Declare left servo
3、 在setup函数中,使用给出的舵机信号的名称后跟一个点,然后通过附加函数attach()调用信号引脚。这个例子告诉系统舵机信号servoLeft应该通过数字引脚13来传输。
servoLeft.attach(13); // Attach left signal to pin 13
4、writeMicroseconds()函数,用于设置脉冲持续时间。
servoLeft.writeMicroseconds(1500); // 1.5 ms stay-still signal
5、write()函数, 作用是将一个角度值写入舵机,设置轴转动的角度(该值是指角度),0为在一个方向全速转动,180为在另一个方向上全速转动,接近90为复位。
servoLeft.write(90); // set servo to mid-point
6、attached()函数,用于检测servo变量是否正确连接至Arduino对应引脚上。返回值为 true 和 false 。
servoLeft.attached()
7、detach()函数, 作用是从对应引脚上分离舵机变量。如果要将所有舵机变量分离,则使用analogWrite()函数将引脚9和引脚10用于PWM输出。
servoLeft.detach()
8、read()函数, 用于读取舵机的当前角度值(传递给上次调用write()的值)。
servoLeft.read()
以上是servo.h库文件的基本函数讲解
例子:
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
电机常用传动方式
联轴器
同步带轮
传动轮
1、电机轴与外部轴同轴,用梅花形弹性连轴器。
2、如果电机轴与外部轴平行但不同轴,用直齿圆柱齿轮来传动,也可用皮带,还可以用链传动,视情况而定。
3、如果两轴不平行,也不同轴,就用万向连轴器。
4、空间里相互垂直,用直齿圆锥齿轮传动,还可以用涡轮涡杆。
销孔卡槽连接
键槽+侧面顶丝孔连接
联轴器孔径要比轴孔径大几丝
PLC 伺服电机及驱动器
伺服电机转动角度的一些相关参数
脉冲当量
指的是每个脉冲所对应的电机转动角度。例如,某伺服电机的编码器为 16 位,驱动器每接收 2 的 16 次方即 65536 个脉冲,电机转一圈,其脉冲当量为 360°/65536≈0.0055°;再如,松下带标准 2500 线编码器的全数字式交流伺服电机,由于驱动器内部采用了四倍频技术,其脉冲当量为 360°/10000=0.036°.
编码器精度
伺服电机的精度取决于电机编码器的精度,编码器的线数或位数决定了其能够测量的角度分辨率。常见的编码器有 16 位、17 位等,位数越高,精度越高。如 17 位编码器的电机,驱动器每接收 2 的 17 次方即 131072 个脉冲电机转一圈,其脉冲当量为 360°/131072≈0.00275°.
转动范围
一般常见的伺服电机转动范围在 0°-360° 之间,但也有一些特殊的伺服电机可以实现多圈转动,具体的转动范围取决于电机的设计和应用需求。例如,在一些需要连续旋转的机械臂关节应用中,可能会使用到能够多圈转动的伺服电机。
角度控制精度
这是衡量伺服电机在控制转动角度时的准确程度的参数,受到编码器精度、驱动器性能、控制算法等多种因素的影响。高性能的伺服电机系统能够实现非常高的角度控制精度,例如在一些精密加工、机器人关节控制等应用中,要求伺服电机的角度控制精度达到 0.01° 甚至更高。
响应时间
指从接收到控制信号到电机达到目标角度所需的时间,反映了伺服电机的动态响应性能。响应时间越短,说明电机能够更快地跟随控制信号进行转动,对于需要快速定位和频繁启停的应用非常重要,一般交流伺服电机从静止加速到额定转速仅需几毫秒,而步进电机则需要 200 到 400 毫秒左右.
伺服电机一般几根接线
1.动力线
伺服电机一般有三相动力线,通常为 U、V、W 三根线。这三根线用于连接伺服电机驱动器的输出端,驱动器通过向这三根线提供三相交流电源来驱动电机旋转。其电压和电流大小根据伺服电机的功率和驱动器的输出规格而定。例如,对于小功率的伺服电机,驱动器输出的相电压可能在几十伏到几百伏之间,电流在几安培以内;而对于大功率伺服电机,电压可能达到更高的数值,电流也会相应增大。
2.编码器线
编码器连接线的数量因编码器的类型和功能而异。对于增量式编码器,一般有 A 相、B 相和 Z 相三根信号线,A 相和 B 相脉冲信号用于确定电机的旋转方向和计算脉冲数以得到位置和速度信息,Z 相脉冲信号用于提供电机旋转一圈的参考位置(零点信号)。除了这三根信号线外,还可能包括电源线(如 + 5V 或 + 24V)和地线,用于给编码器供电。
绝对式编码器的接线相对复杂一些。它除了有电源和地线外,还有多根数据线用于输出电机的绝对位置信息。例如,对于采用串行通信协议(如 SSI、BiSS - C 等)的绝对式编码器,可能有 4 - 10 根左右的数据线,这些线用于传输位置码等信息,使得驱动器能够直接读取电机的绝对位置,而不需要像增量式编码器那样进行初始化等操作。
3.制动线(部分电机有)
有些伺服电机带有电磁制动器,用于在电机断电时快速制动电机,防止电机在负载的作用下自由旋转。这种电机就会有制动线,一般有两根,一根为制动电源输入线(通常接 + 24V),另一根为制动控制线。当需要制动电机时,驱动器会控制制动控制线的电平,使制动器通电工作,抱紧电机轴实现制动。
4.接地线
为了确保安全和抗干扰,伺服电机还有一根接地线(PE)。这根线用于将电机的金属外壳等部分接地,防止电机漏电时对人员和设备造成危害,同时也有助于减少电磁干扰,保证电机和控制系统的稳定运行。
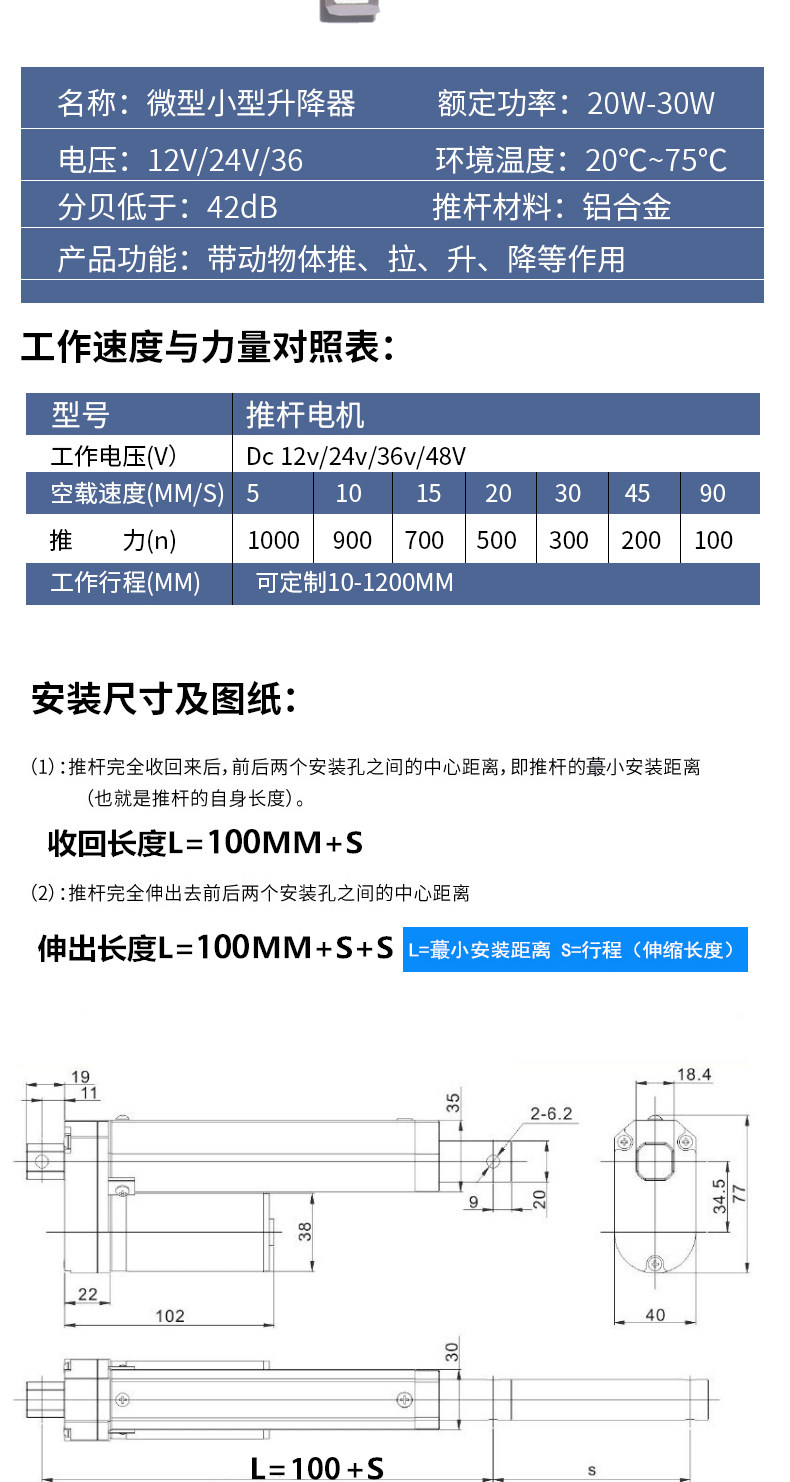
小型直流电动推杆电机大推力往复伸缩杆微型升降器推杆马达12V24V
小型直流电动推杆电机大推力往复伸缩杆微型升降器推杆马达12V24V
关于接线方式: 直流电动推杆电机(12V/24VDC) 线里有2条线接正负极,正负极互换控制推出和收回,可以加一个正反开关控制伸缩。速度越快,推力越小;反之速度越慢,推力越大
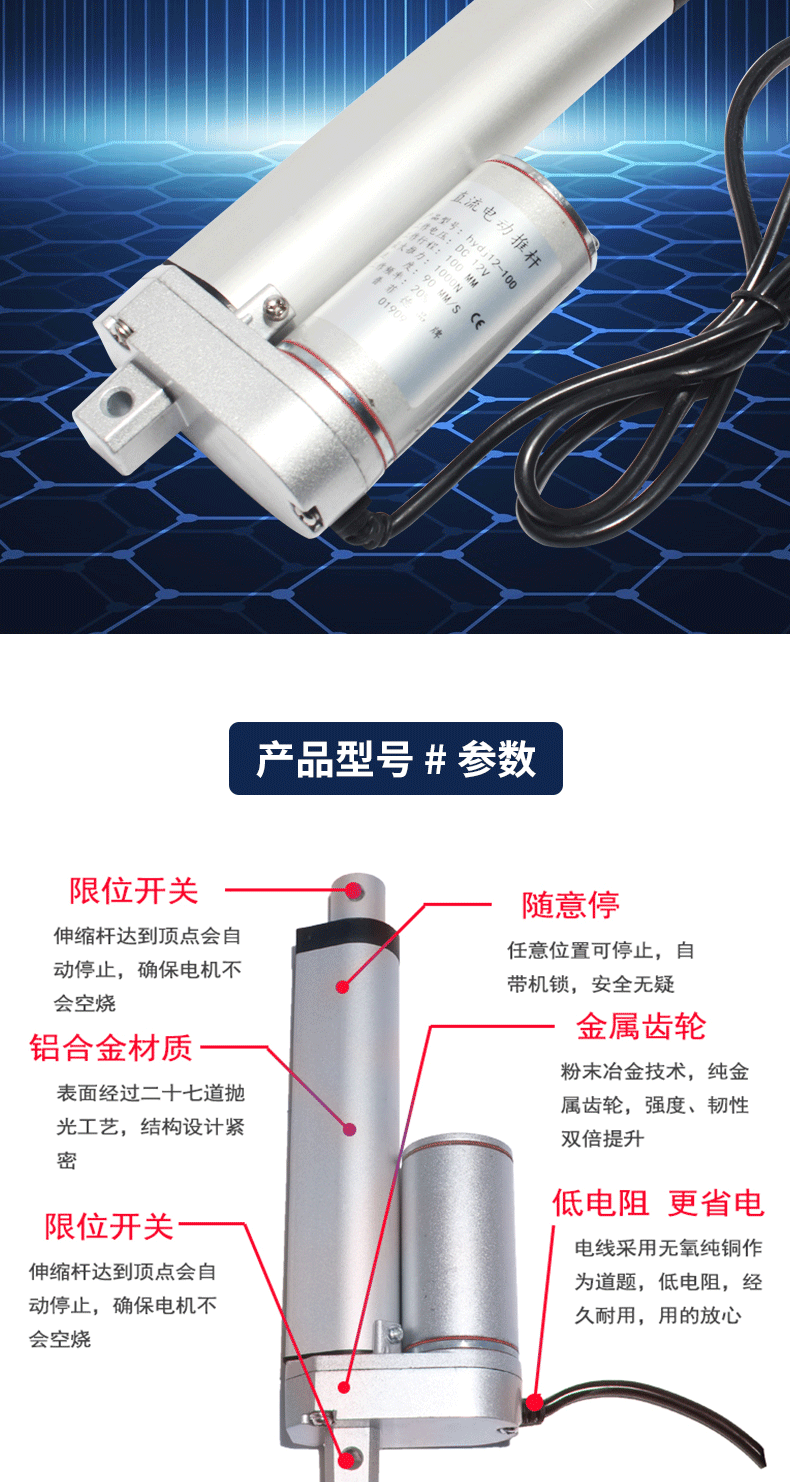
使用说明及注意事项:
1. 推杆电机内置限位开关,到头/到尾(伸到头/缩到底)自动停止,中间任意断电即停止。
2.推杆电机行程不可调,出厂已经设定好了。 推杆为非防水型,
3.注意多台推杆同时使用,由于内部齿轮,电机转子等配件存在公差,使得速度大致一样 注:推杆电机支架是需要另外购买的,需要的用户联系客服。 推杆电机不防水,不适合在水汽重的环境和有水的场合使用(进水损坏的,不在免费保修范围内)
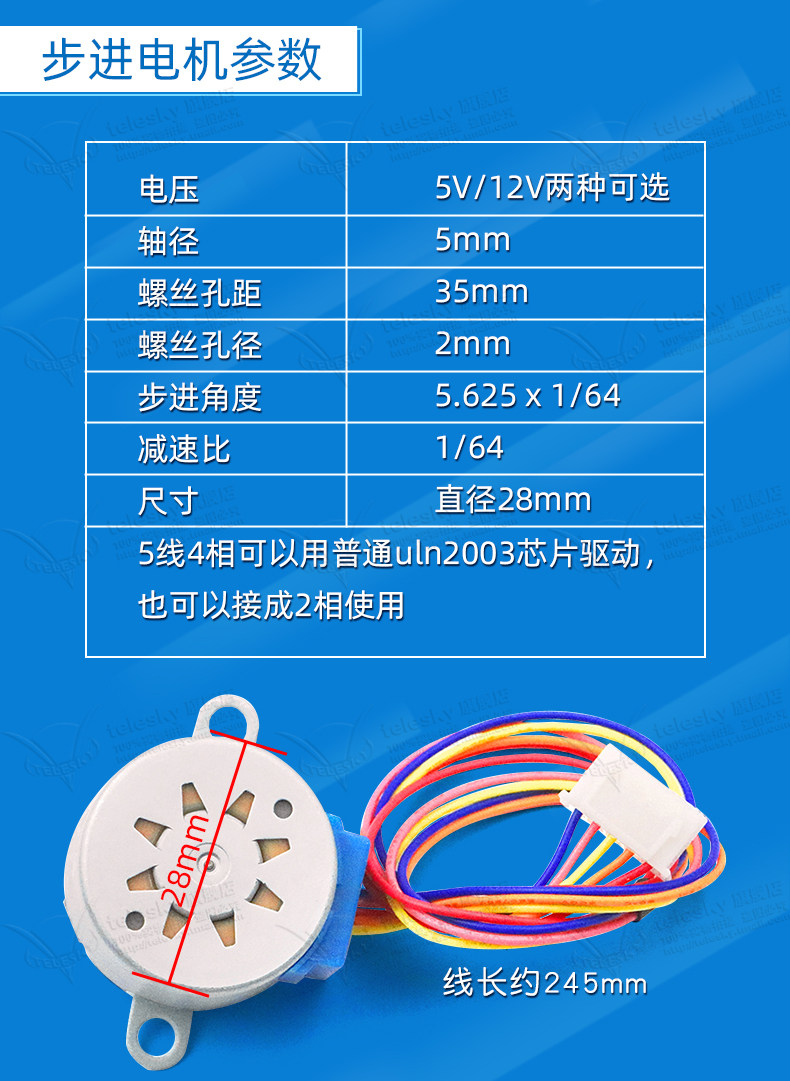
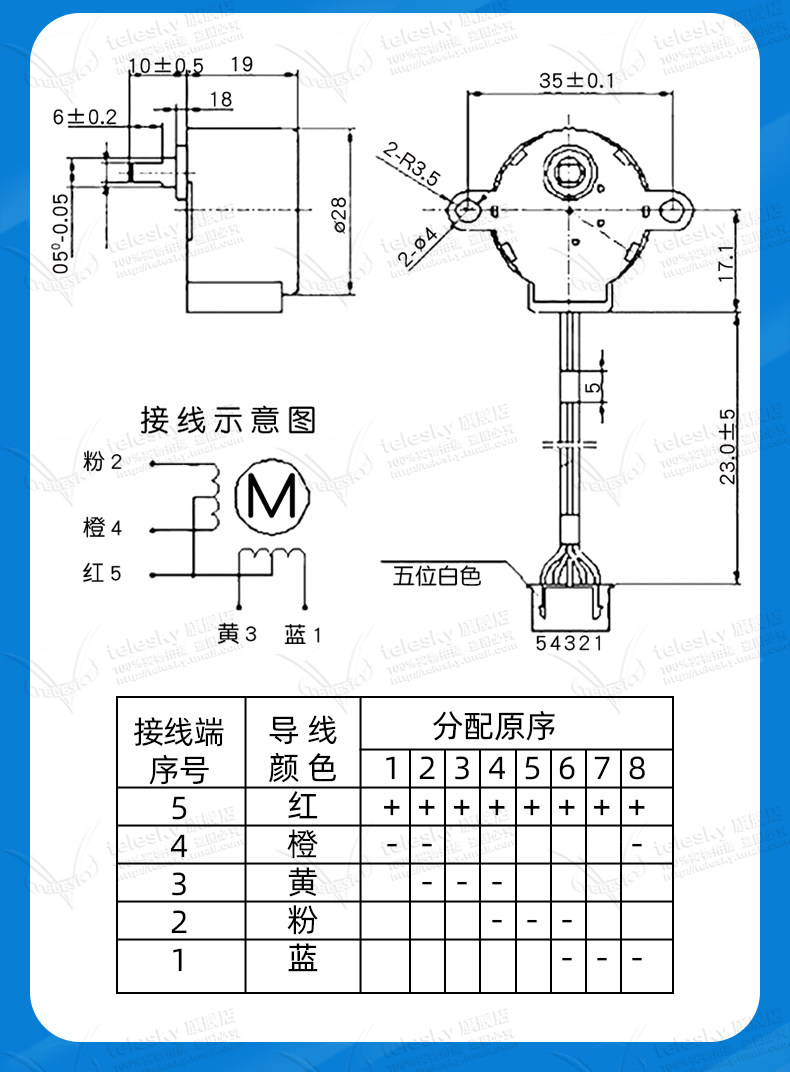
步进电机基本参数
相数:表示里面几个线圈
步距角 1.8度,那么转一圈是多少步 360/1.8=200
GA12-N20减速马达 智能小车3V6V12V微型直流齿轮减速电机低速电机
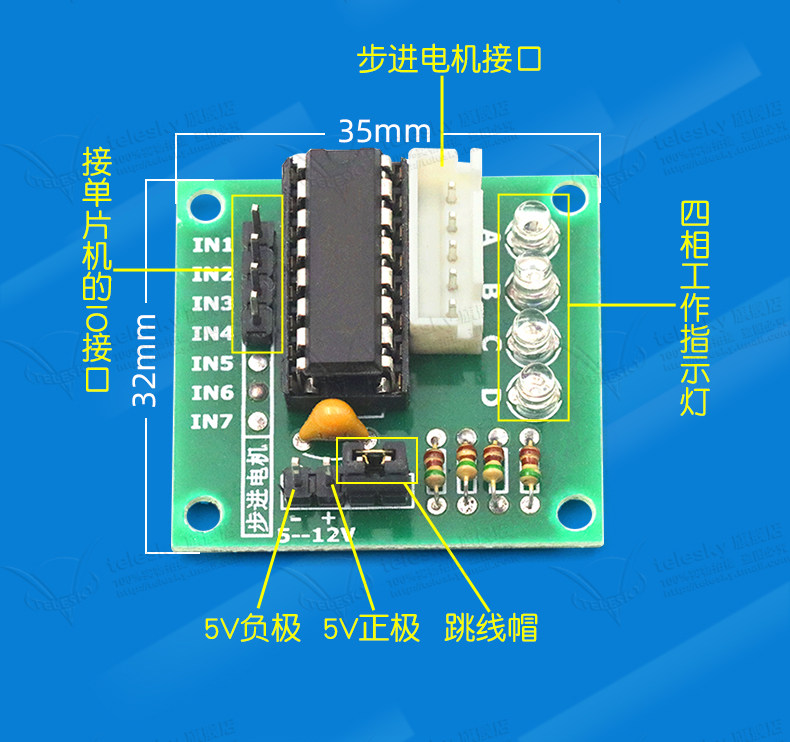
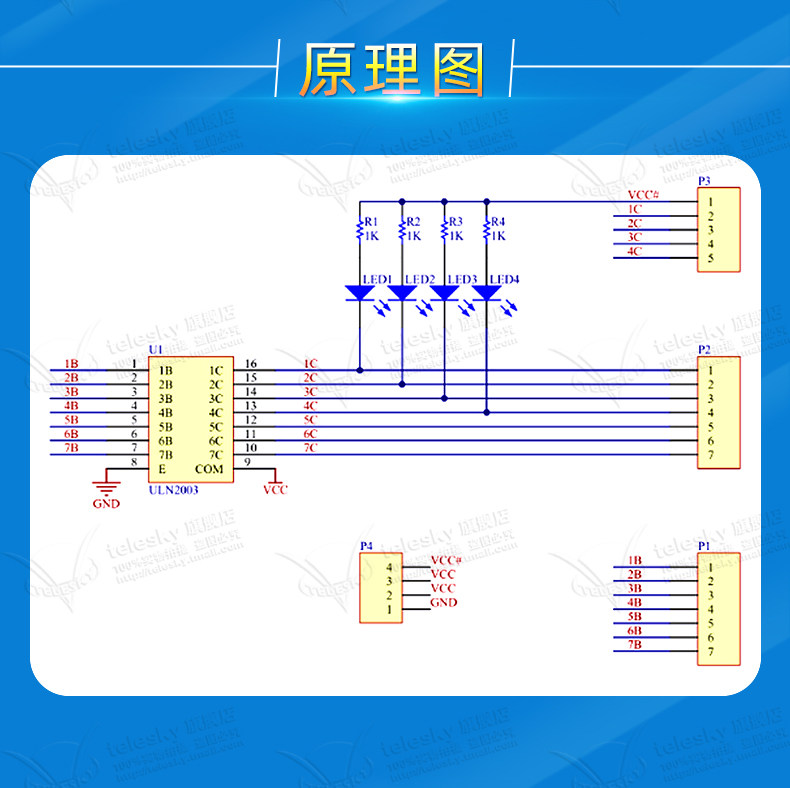
步进电机28BYJ4+ULN2003驱动板4相5线 5V12V步进电机减速电机模块
【1477】
代码
//使用arduino IDE自带的Stepper.h库文件
//注意28BYJ-48为减速电机所以速度不会很快
//具体引脚不写了看图片吧
#include <Stepper.h>
// 这里设置步进电机旋转一圈是多少步
#define STEPS 100
//设置步进电机的步数和引脚(就是注意点2里面说的驱动板上IN1~IN4连接的四个数字口,按顺序接8 9 10 11引脚 )。
Stepper stepper(STEPS, 8, 10, 9, 11);//引脚要互换
void setup()
{
// 设置电机的转速:每分钟为90步
stepper.setSpeed(90);
// 初始化串口,用于调试输出信息
Serial.begin(9600);
}
void loop()
{
// 顺时针旋转一周
Serial.println("shun");
stepper.step(2048); //4步模式下旋转一周用2048 步。
delay(500);
// 逆时针旋转半周
Serial.println("ni");
stepper.step(-1024); //4步模式下旋转一周用2048 步。
delay(500);
}
资料下载:https://pan.baidu.com/s/11S-LUPRIBbIJFjZV4f2OhQ 提取码:t5ri
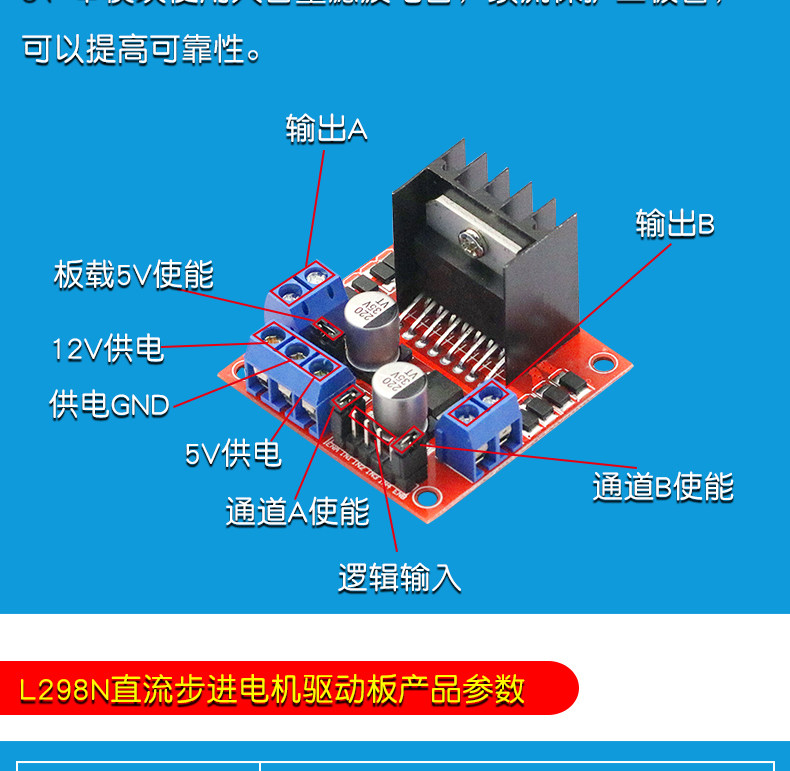
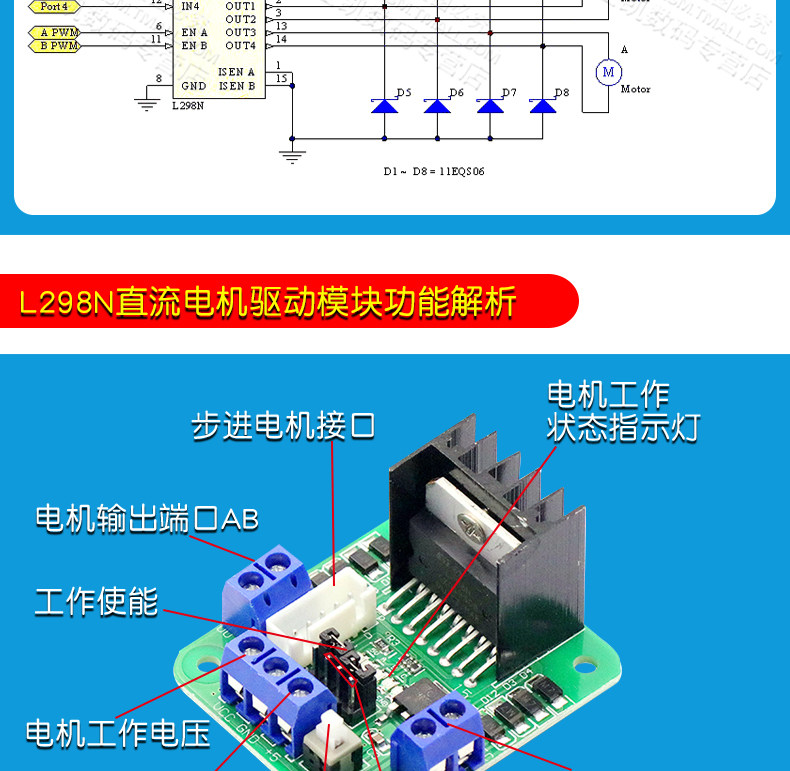
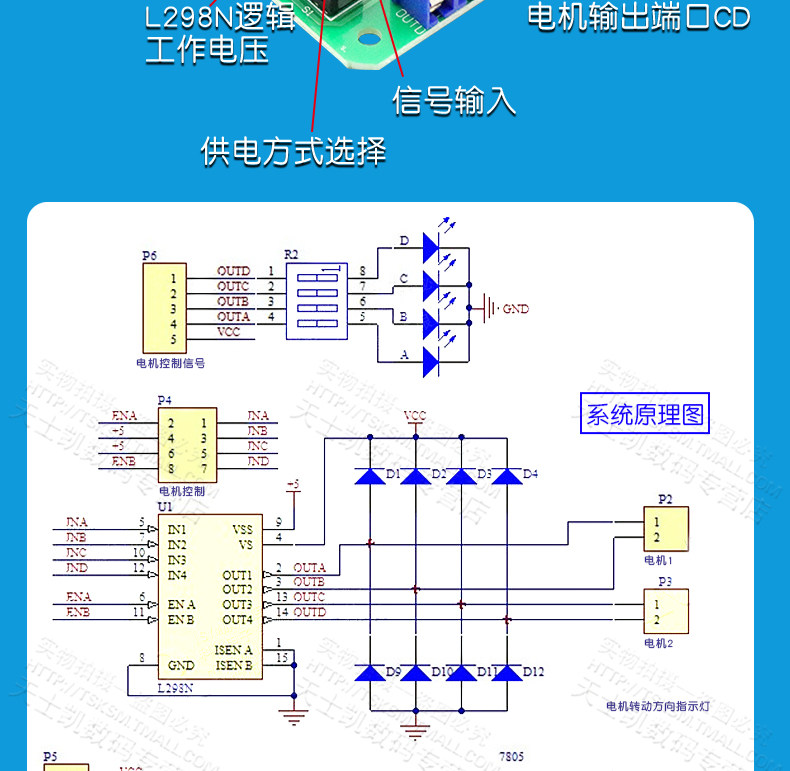
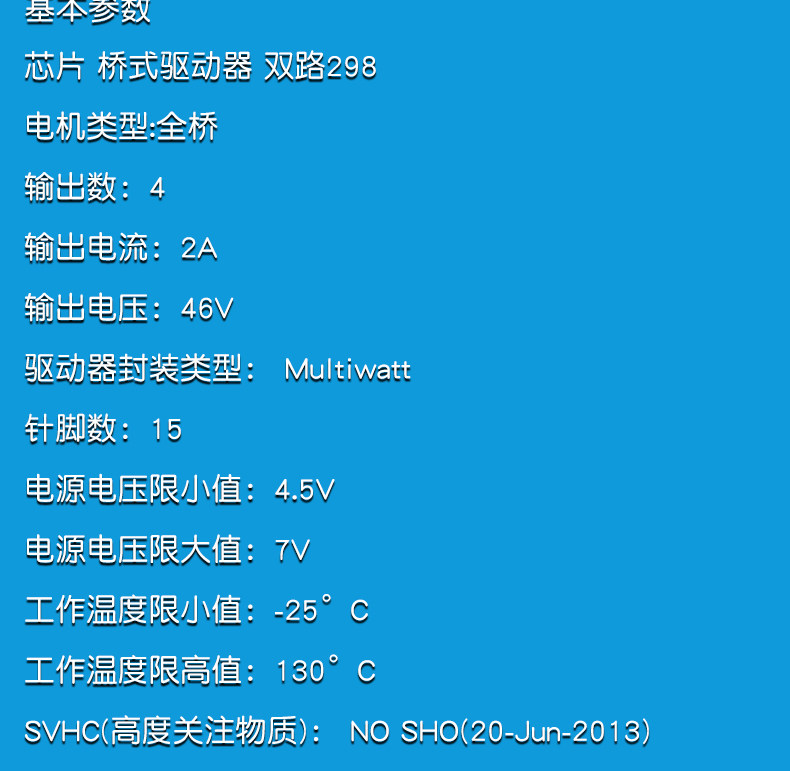
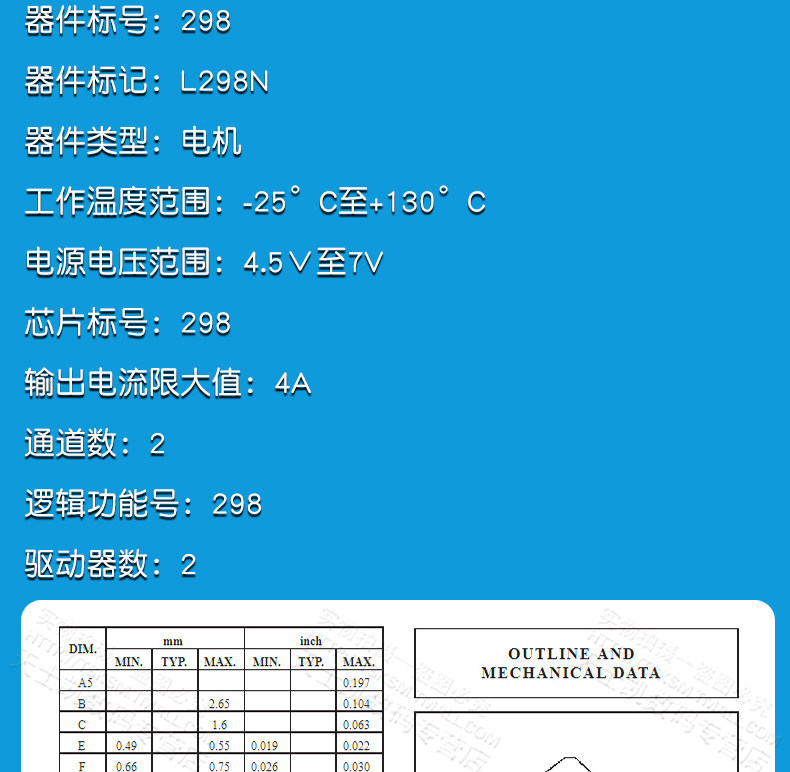
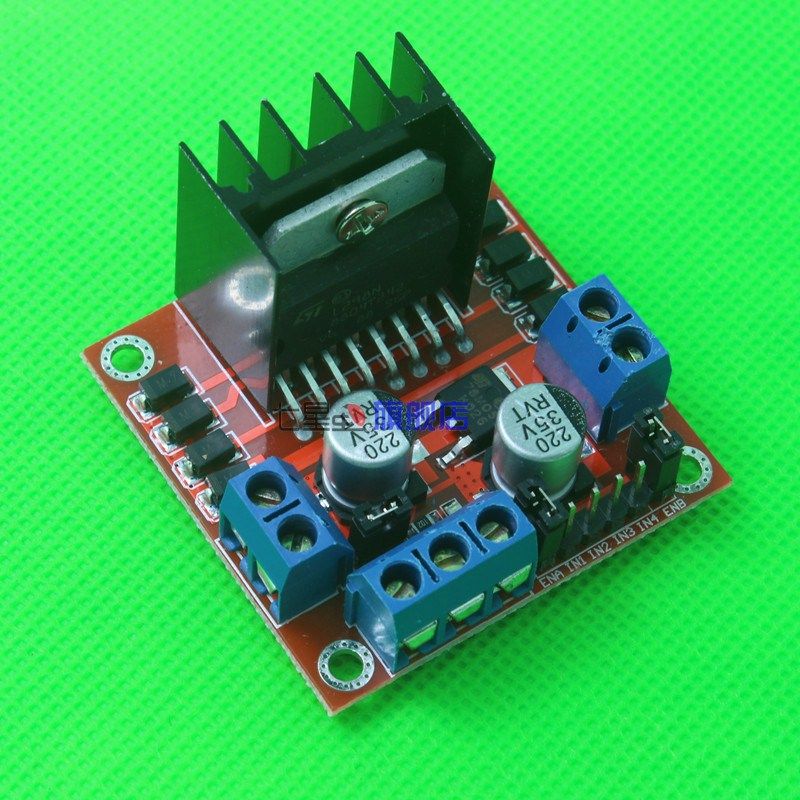
L298N驱动板驱动器模块步进电机直流电机微型小马达智能车机器人
L298N电机驱动板模块 步进电机直流电机 智能车循迹机器人Arduino
https://pan.baidu.com/s/1eN7QxuYVDgUCQ3hEBSlTiw 提取码:1234
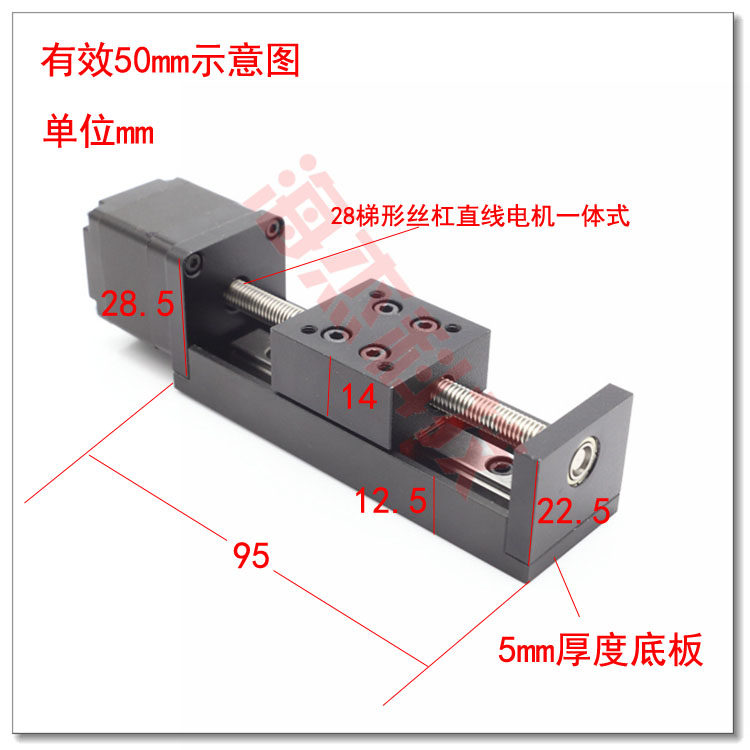
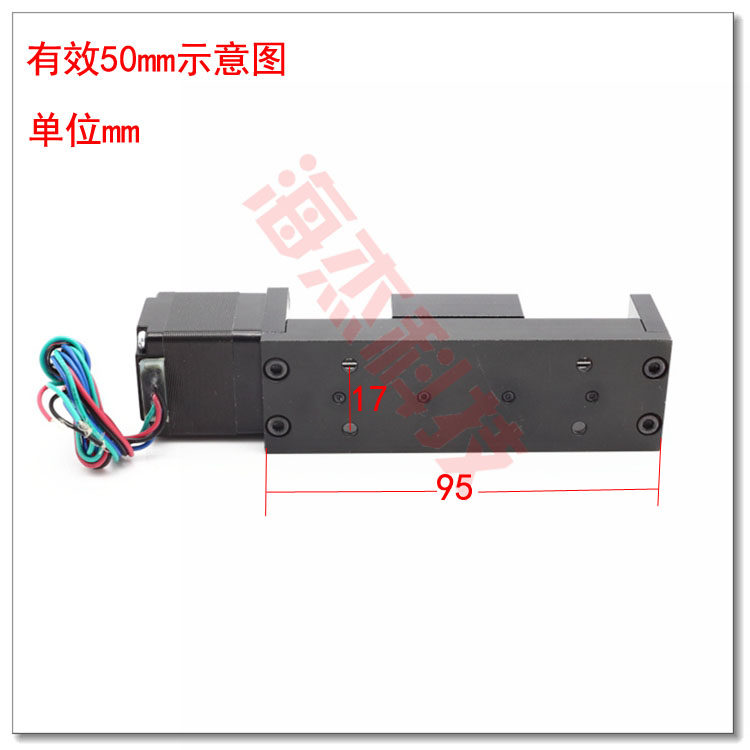
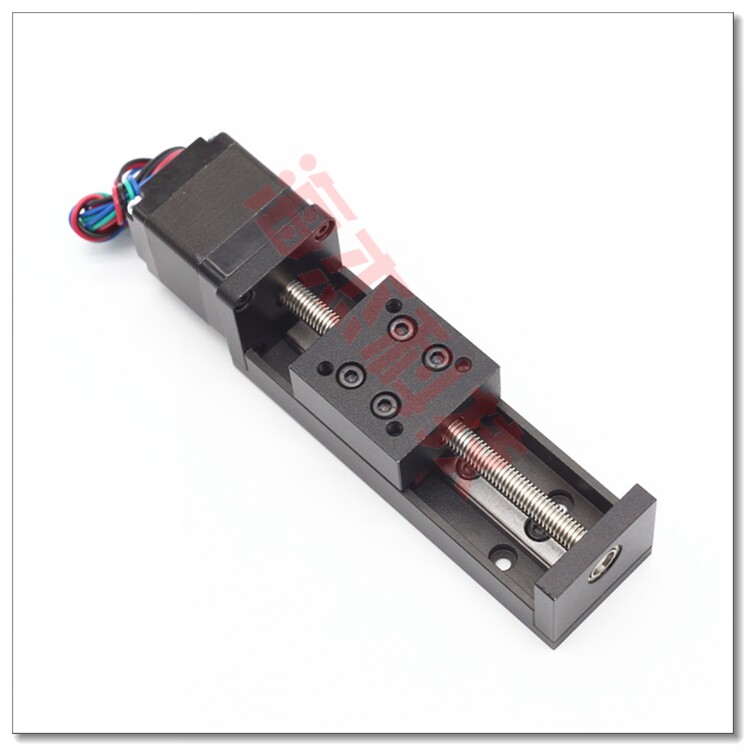
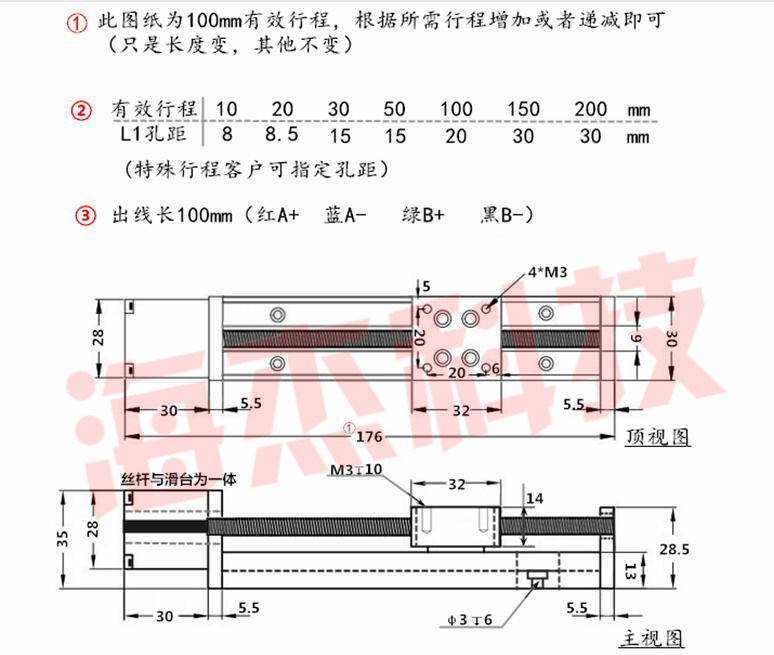
丝杆导轨滑台
丝杆导轨滑台
此为单个滑台连接,需要视频种控制器,驱动器的买家请点击下方图片购买
不包邮地区:新疆、西藏、青海、港澳台、甘肃、云南、贵州、海南及海外地区
步进电机驱动器
使用视频
步进电机驱动器
型号:两相57步进驱动器MC542E DSP数字芯片 4.2A 105元
两相86步进驱动器MC860E DSP数字芯片 6A 160元
两相57闭环套装LC57H276 2NM/LCDA257S 298元
三相 57闭环套装 LC57H380 2NM/LCDA357L 320元
三相 57闭环套装 LC57H3100 3NM/LCDA357H 370元
两相 86闭环套装 LC86H2114 8NM/LCDA86G 480元
200W伺服套装 60法兰 0.637NM 3000转 1100元一套
750W伺服套装 80法兰 2.4NM 3000转 1200元一套
1KW伺服套装 80法兰 4NM 2500转 1350元一套
1.5W伺服套装 130法兰 10NM 1500转 1950元一套
本店承诺:所有产品保证为原厂原装全新正品,出厂前所有产品均通过72小时不间断通电老化测试,让您使用无后顾之忧,提供技术咨询!如有疑问,请联系客服旺旺,我们将竭诚为你服务!
GA12-N20减速马达 智能小车3V6V12V微型直流齿轮减速电机低速电机
电磁推拉杆
arduino-解决舵机与直流电机冲突问题
可能很多人在使用 servo 库控制舵机时与直流电机发生冲突,在调用 Servo.attach(pin) 方法之后,可能会有电机不转了
也就是说是servo库与PWM调速有冲突,在9pin和10pin上禁用 analogWrite()函数调速,所以电机就不转了,这时候可以更换点机的pin解决问题,但是有的驱动板针脚不好改动,所以只能不使用servo库了,可以使用下面代码解决
int servoPin = 8; //定义舵机接口数字接口7 也就是舵机的橙色信号线。
void setup() {
pinMode(servoPin, OUTPUT); //设定舵机接口为输出接口
}
void loop() {
servo(3);
delay(600);
}
void servo(int angle) { //定义一个脉冲函数
//发送50个脉冲
for(int i=0;i<50;i++){
int pulsewidth = (angle * 11) + 500; //将角度转化为500-2480的脉宽值
digitalWrite(servoPin, HIGH); //将舵机接口电平至高
delayMicroseconds(pulsewidth); //延时脉宽值的微秒数
digitalWrite(servoPin, LOW); //将舵机接口电平至低
delayMicroseconds(20000 - pulsewidth);
}
delay(100);
}
有刷电机无刷电机
有刷电机是传统产品,性能比较稳定。无刷电机是升级产品,其寿命性能比有刷电机好。但其控制电路比较复杂,对元件的老化筛选要求比较严格
无刷电机的设备可以运用于:乳制品行业、酿造行业、肉制品加工行业、豆制品加工行业、饮料加工行业、糕点加工业、药品业、电子精密厂、等一些更高要求的无尘车间等,像迪奥电器产的无刷电机(DIHOUR)干手器,运用到工厂里比较多
碳刷电机只能适用于各式洗手间等对要求不是太高的区域,而像无尘车间和防爆车间就无法使用了!
使用寿命,无刷电机可连续工作20000小时左右,常规的使用寿命7-10年。碳刷电机:可连续工作5000小时左右,常规的使用寿命2-3年。
节能方面,相对而言,无刷电机的耗电量只是碳刷的1/3。
步进电机与驱动
电机基本参数:
步矩角:1.8° 电流: 1.7A
电阻: 1.8欧姆 电感:3.2mH
静力矩:52N.cm 定位力矩:2.6N.cm
转动惯量:68 引线数目:4
电机重量:350g 机身长:48mm
适配驱动器: 两相步进驱动器 2M420,2M415
驱动板
M420B驱动器可以替代M415B
最大驱动电流2A 最高128细分
适合驱动20 28 35 39 42机座号步进电机
适合各种小型自动化设备和仪器,如打标机、贴标机、割字机、绘图仪、小型雕刻机、数控机床、
传动机构、医疗器械等。对于电机自身的振动、噪声及精度和高速时的输出力矩都有明显的改善。
电机分类,舵机
直流电机 交流电机 伺服电机 步进电机
托辊、轧辊、辊轮、滚轮都是什么及其区别
1、托辊:是带式输送带机的重要部件,种类多,数量大;
2、轧辊:是轧钢厂轧钢机上的重要零件,利用一对或一组轧辊滚动时产生的压力来轧碾钢材;
3、辊轮:一种滚制螺纹的工具。在滚制螺纹时,可用单辊、双辊或三辊;
4、滚轮:也是在包装机械以及饮料生产行业通行的备件称呼法,也叫卷封轮、封口滚轮、罗尔。
传送带滚轴托辊
传送带滚轴托辊
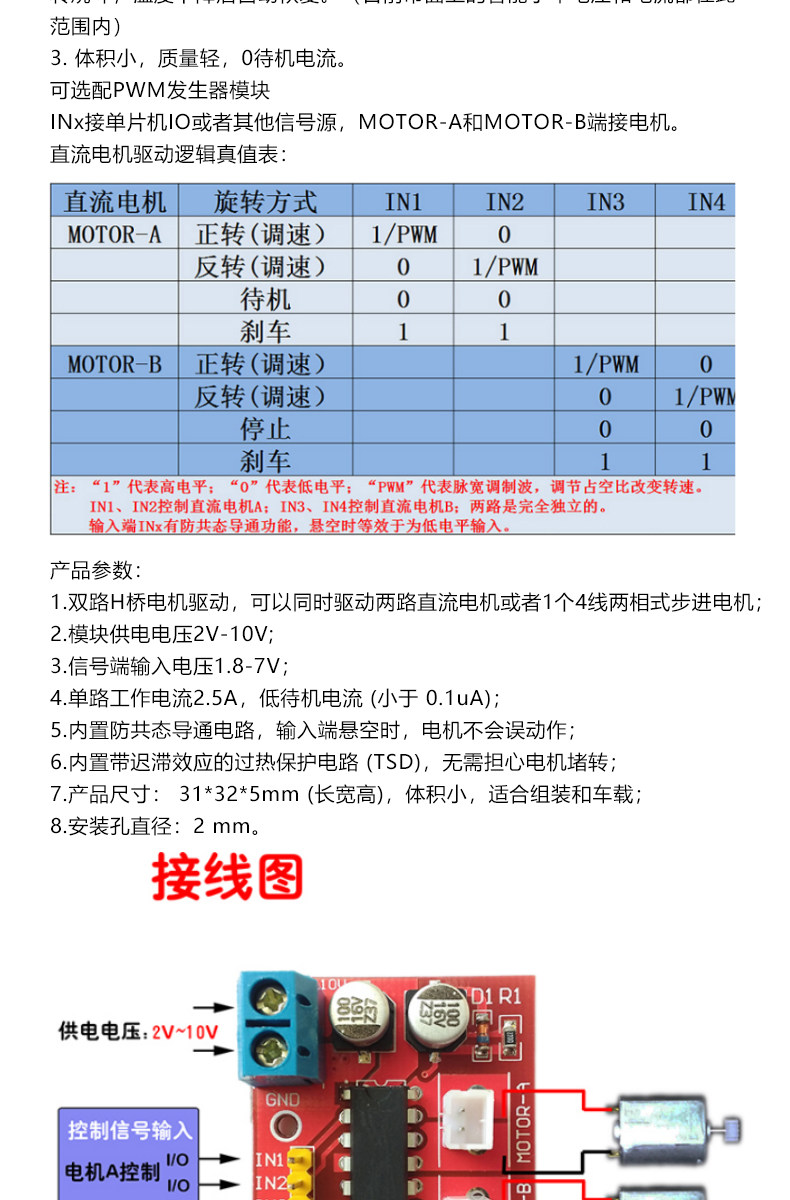
XY-2.5AD 2.5A双路电机驱动模块 正反转 PWM调速 双H桥替代L298N
步进电机28BYJ48+ULN2003驱动板 4相 5线 5V12V步进电机 减速电机
购买地址
驱动资料下载: http://pan.baidu.com/s/1eQ7qoTk
进步机下载: http://pan.baidu.com/s/1gd1iAzh
七星虫 42步进电机A4988驱动模块CNC V3雕刻机扩展板3D打印机配件
购买地址
七星虫 L298N电机驱动板模块 步进电机模块 兼容arduino
购买地址
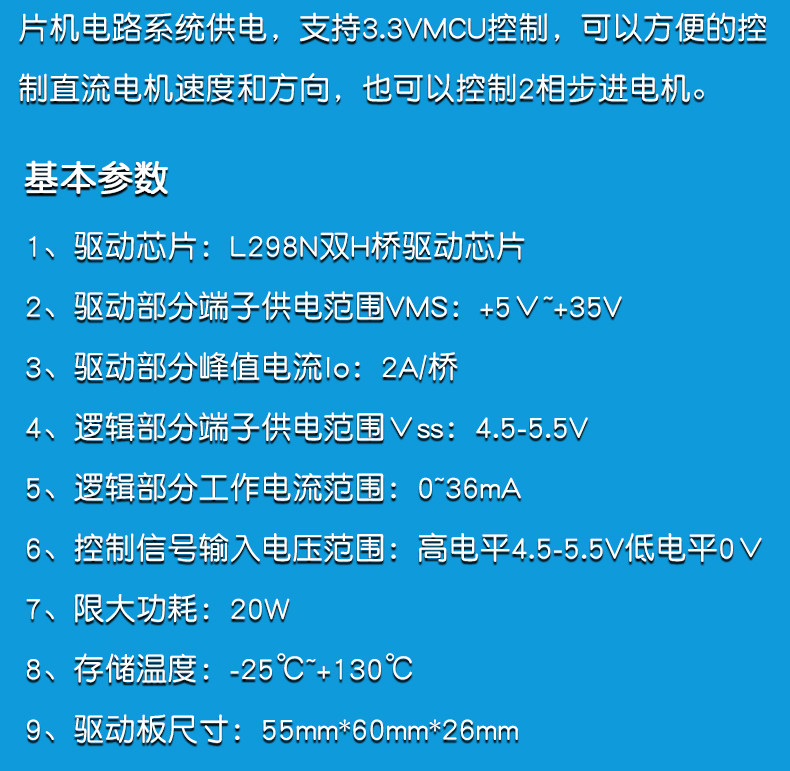
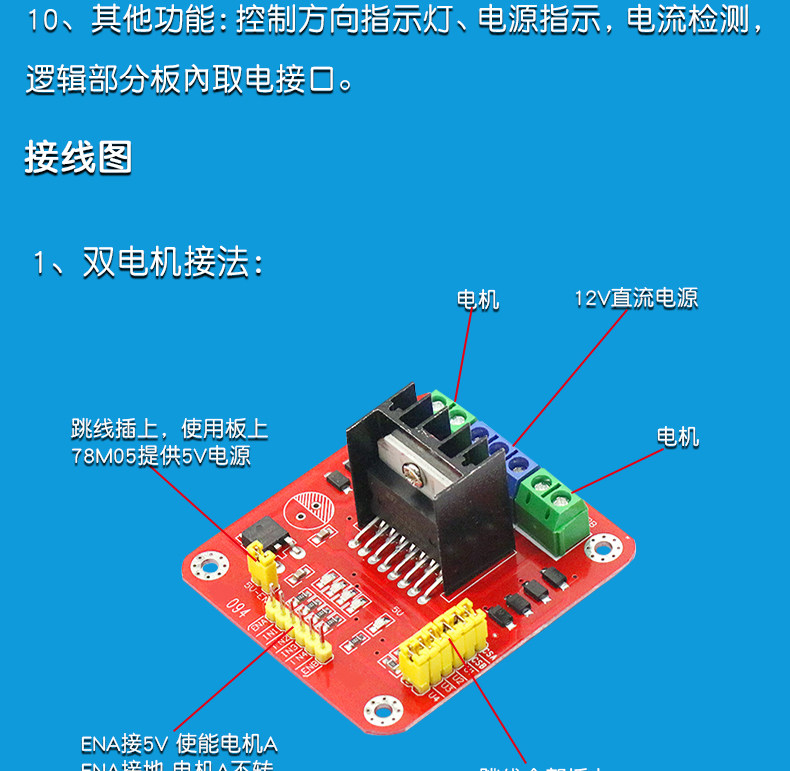
L298N电机驱动板模块 步进电机 智能车 机器人 Arduino 可驱动两个电机
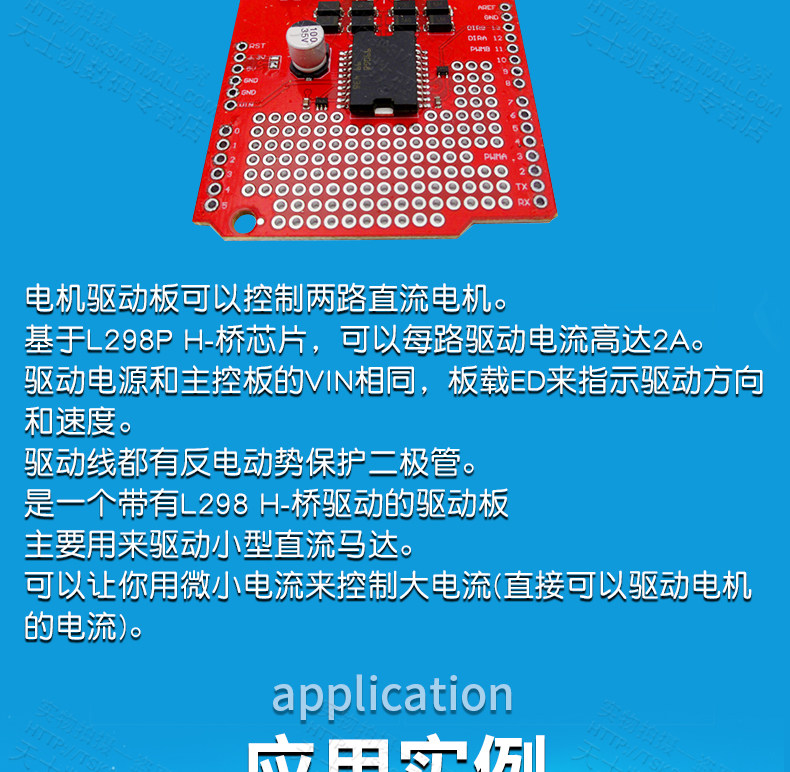
应用:1、驱动2路直流电机
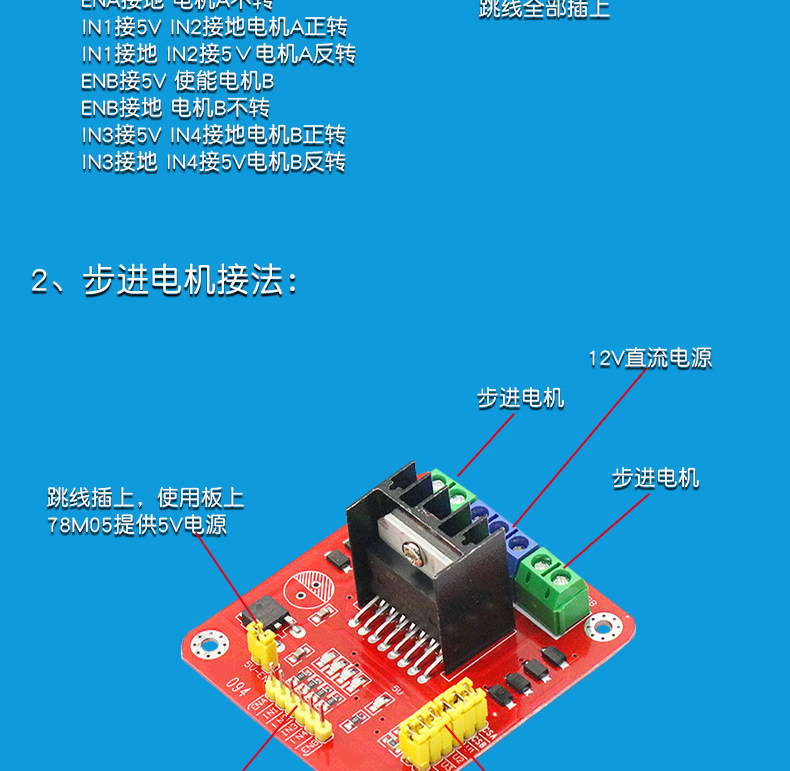
2、驱动2相4线步进电机、4相5线,4相6线步进电机
类型 : 半桥
输入类型 : 非反相
输出数 :4
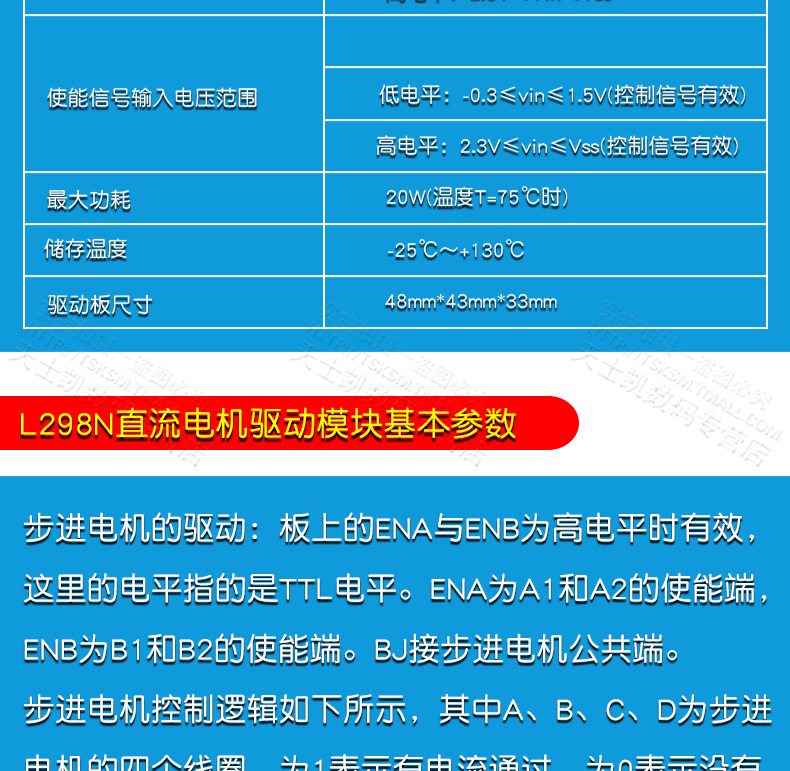
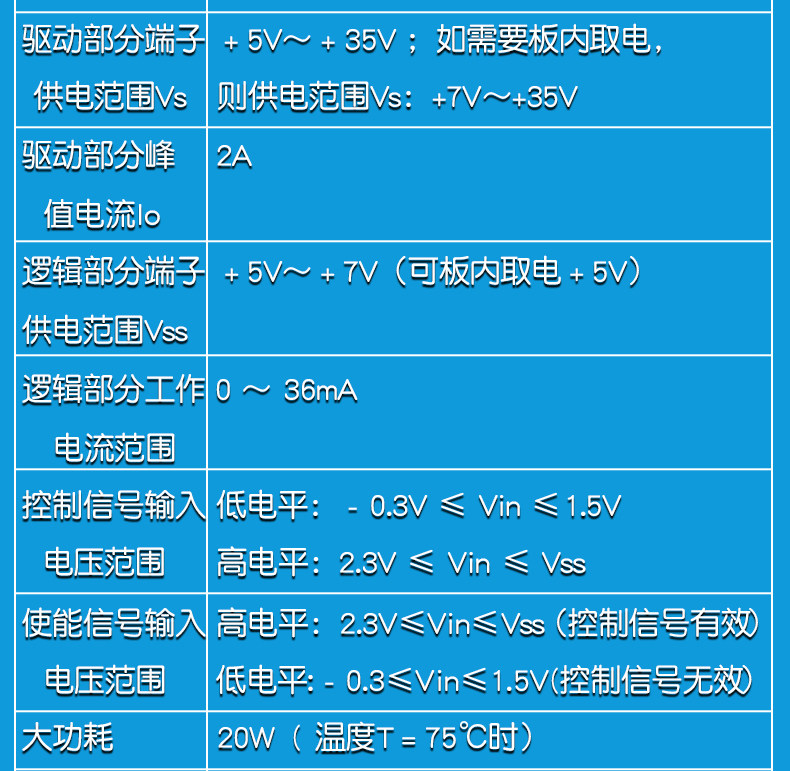
电流-输出/通道 :2A
电流-峰值输出 :3A
电源电压 :4.5 V ~ 46 V
工作温度 :-25°C ~ 130°C
/////////////////////////////////////////
L298工作电压高达46V 总DC电流达4A 低饱和电压 L298具有过温保护功能 逻辑“0”输入电压高达1.5V(高抗噪性)
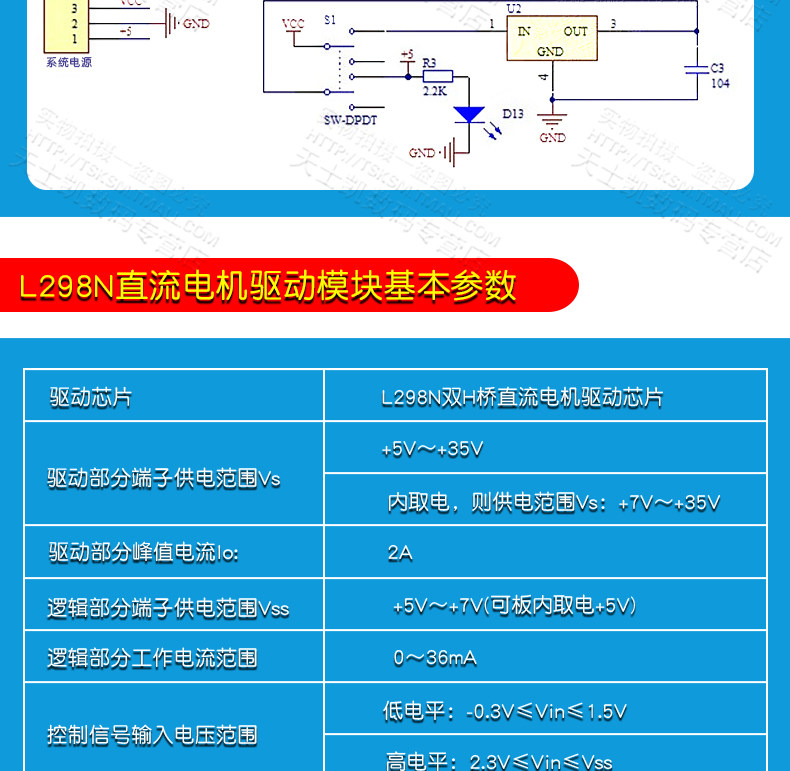
注意事项:
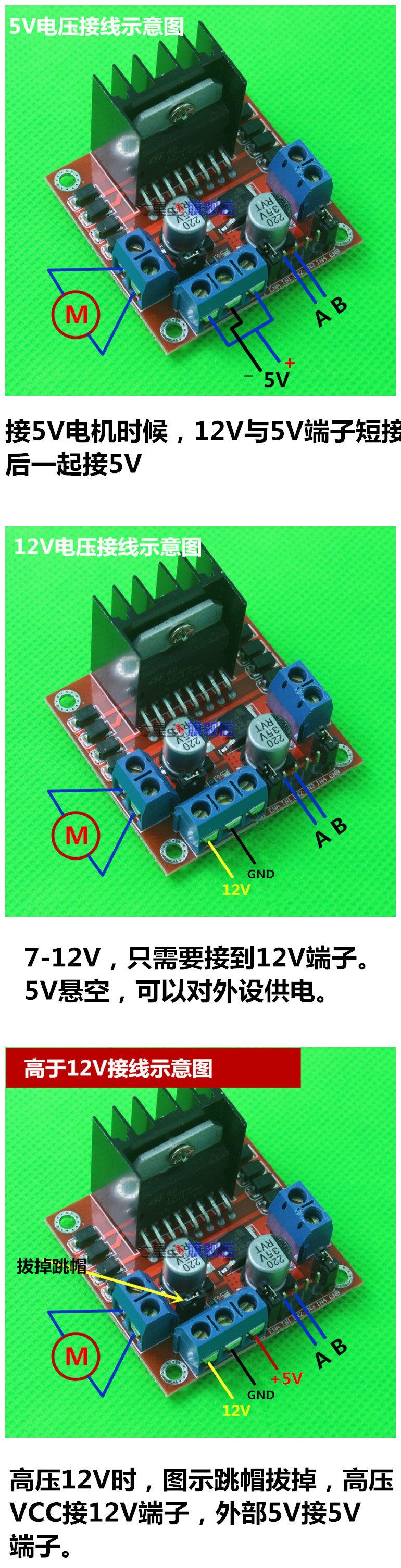
1.当你的驱动电压(上图标识为12V输入,实际可以接受的输入范围是7-12V )为7V
2.当驱动电压高于12V,小于等于24V(芯片手册中提出可以支持到35V,但是按照经首先必须拔除板载5V输出使能的跳线帽。然后在5V输出端口外部接入5V
L298模块一个,散装。
轴承安装 控制轴向运动 轴承座
轴肩,套筒,轴承盖
国产直线导轨滑块滑轨线轨HG15HG20HG25HG30 HG35 HG45
导轨二米以下走快递 超过二米走物流自提。如地方稍偏可提前与本公司业务联系。
(每周日工厂休息 发货可能延缓)详细请询问客服 !
导轨滑块价格:(本公司生产导轨滑块分颜色分为几种 全黑 红 黑 绿 黑 红 绿 是以前老产品数量不多,颜色随机发货 ,介意者联系客服。)
注:导轨可按照客户要求长度切割(单根最长四米 ) (重要:导轨一经切割,除质量问题外不予退换,滑块可退)
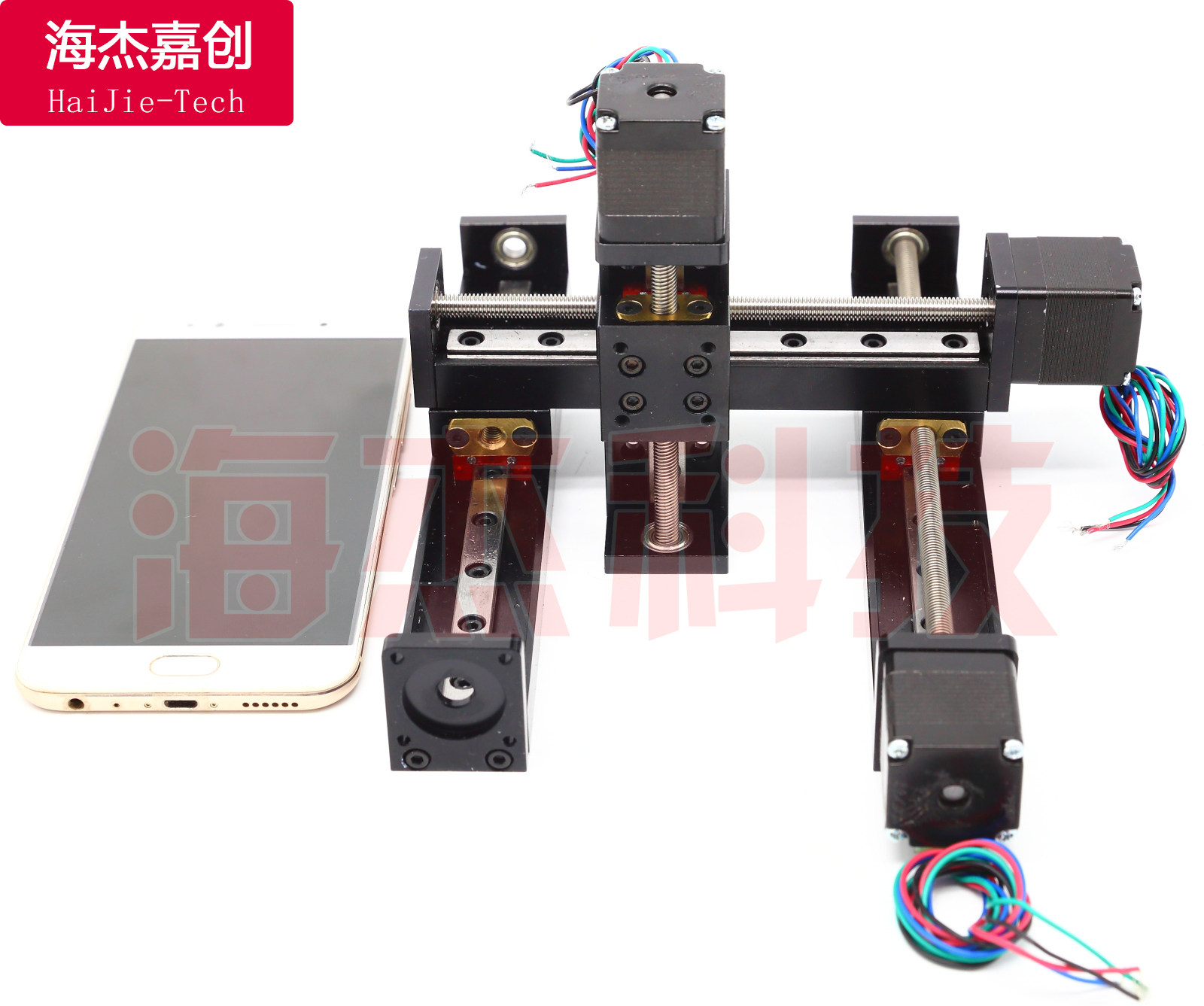
直线模组
直线模组
丝杆模组
同步带模组卡座
kk模组
arduino(2560)与步进电机驱动器连线
步进电机与步进电机控制器连接:
A+:黑
A-:绿
B+:红
B-:蓝
电机控制器与arduino板连接:
PUL-,DIR-,EN-连arduino的地
EN+:脱机信号,接地或者不接
DIR+:控制转动方向,高电平正转
PUL+:控制脉冲
联轴器选择,轴承座组件
根据扭矩轴两边轴大小
轴承的内径和轴的外径如何匹配
1 轴和轴承内经一样大,加热后再装 2.你的的轴是2.2MM的话 这个空比你的轴大2丝最好 丝指的是 代表卡尺上的2丝
轴和轴承的配合:
(1)轴承配合一般都是过渡配合,但在有特殊情况下可选过盈配合,但很少; (2)因为轴承与轴配合是轴承的内圈与轴配合,使用的是基孔制,本来轴承是应该完全对零的,我们在实际使用中也完全可以这样认为,但为了防止轴承内圈与轴的最小极限尺寸配合时产生内圈滚动,伤害轴的表面,所以我们的轴承内圈都有0-几um的下偏公差来保证内圈不转动,所以轴承一般选择过渡配合就可以了,即使是选择过渡配合也不能超过3丝的过盈量; (3)配合精度等级一般就选6级,有的时候也要看材料,还有加工工艺,理论上7级精度有点偏低了,5级配合的话就要用磨; (4)一般选用是: 轴承内圈与轴配合,轴选k6; …….外……孔……,孔选K6或K7 轴和皮带轮的配合: 电机轴和皮带轮间隙配合,然后加的定位键,如果是 过度配合的话,电机轴发热膨胀会涨坏皮带轮,因此要有间隙!
配合指的是基本尺寸相同的相互结合的孔和轴公差带之间的关系。决定结合的松紧程度。孔的尺寸减去相配合轴的尺寸所得的代数差为正时称间隙,为负时称过盈,有时也以过盈为负间隙。
1
配合的种类
(1)间隙配合
具有间隙(包括最小间隙等于零)的配合称为间隙配合。此时,孔的公差带在轴的公差带之上。间隙的作用为贮藏润滑油、补偿各种误差等,其大小影响孔、轴相对运动程度。
适用范围:间隙配合主要用于孔、轴间的活动联系,如滑动轴承与轴的联接。
由于孔、轴的实际尺寸允许在各自的公差带内变动,所以孔、轴配合的间隙也是变动的。当孔为最大极限尺寸而轴为最小极限尺寸时,装配后的孔、轴为最松的配合状态,称为最大间隙Xmax;当孔为最小极限尺寸而轴为最大极限尺寸时,装配后的孔、轴为最紧的配合状态,称为最小间隙Xmin。
(2)过盈配合
具有过盈(包括最小过盈等于零)的配合称为过盈配合。此时,孔的公差带在轴的公差带之下。过盈配合中,由于轴的尺寸比孔的尺寸大,故需采用加压或热胀冷缩等办法进行装配。
适用范围:过盈配合主要用于孔轴间不允许有相对运动的紧固联接,如大型齿轮的齿圈与轮毂的联接。
在过盈配合中,孔的最大极限尺寸减轴的最小极限尺寸所得的差值为最小过盈Ymin,是孔、轴配合的最松状态;孔的最小极限尺寸减轴的最大极限尺寸所得的差值为最大过盈Ymax,是孔、轴配合的最紧状态。
(3)过渡配合
孔和轴的公差带互相交叠,可能具有间隙、也可能具有过盈的配合(其间隙和过盈一般都较小)。
适用范围:过渡配合主要用于要求孔轴间有较好的对中性和同轴度且易于拆卸、装配的定位联接,如滚动轴承内径与轴的联接。
孔的最大极限尺寸减轴的最小极限尺寸所得的差值为最大间隙Xmax,是孔、轴配合的最松状态;孔的最小极限尺寸减轴的最大极限尺寸所得的差值为最大过盈Ymax,是孔、轴配合的最紧状态。
2
三种配合类别的区别
(1)间隙配合
a.孔的实际尺寸永远大于或等于轴的实际尺寸。
b.孔的公差带在轴的公差带的上方。
c.允许孔轴配合后能产生相对运动。
(2)过盈配合
a.孔的实际尺寸永远小于或等于轴的实际尺寸。
b.孔的公差带在轴的公差带的下方。
c.允许孔轴配合后使零件位置固定或传递载荷。
(3)过渡配合
a.孔的实际尺寸可能大于或小于轴的实际尺寸。
b.孔的公差带与轴的公差带相互交叠。
c.孔轴配合时,可能存在间隙,也可能存在过盈。
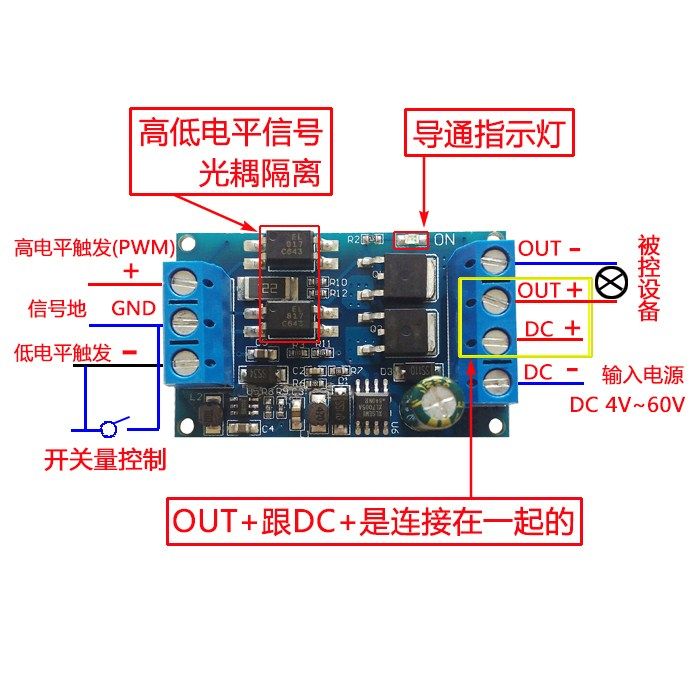
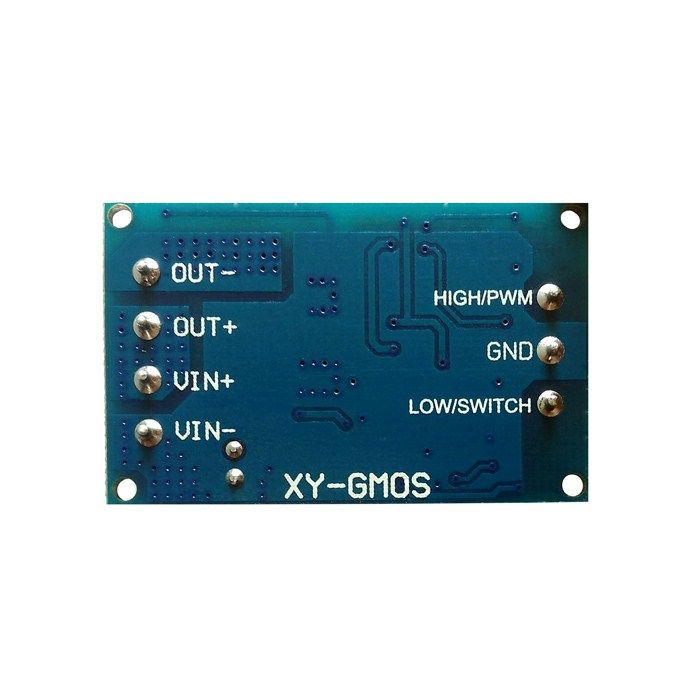
高电压 大功率MOS管 触发开关驱动模块 PWM调节电子开关控制板
模块亮点:
1.本模块支持 高电平触发,低电平触发,开关量控制,PWM控制 ;
2.采用 原装进口双MOS并联有源输出 ,内阻更低,电流更大,功率强劲, 常温下10A,600W ,满足了大多数设备的使用;
3.支持 超宽电压:DC 4V~60V ;
4.轻松实现大功率设备的控制。
注意:
1. 在同一时刻,只能有一种信号来控制本模块,不能同时使用2 种及2 种以上的信号来控制本模块;
2. 高电平触发电压范围:DC3.0V~24V ,即信号在3.0V~24V 时MOS 管导通,低于0.6V ,即0V~0.6V ,MOS 管关闭,信号电压切不可在0.6V~3.0V 之间,那样MOS 处于不完全打开状态,大功率使用烧毁MOS ;
3. 低电平触发电压范围:DC 0V~0.6V ,即信号电压在0V~0.6V 时MOS 管导通,高于3.0V ,MOS 管关闭,信号电压切不可在0.6V~3.0V 之间,那样MOS 处于不完全打开状态,大功率使用烧毁MOS 。
产品参数及应用:
1: 工作电压:DC 4V--60V;
2: 触发信号源: 高电平 触发(DC3.0V--24V),低电平触发(DC 0.0V~0.6V ),开关量控制, 可以接单片机 IO口, PLC 接口,直流电源等 ,可以接PWM信号,信号频率0--2.5KHZ 支持。
3: 输出能力:直流DC 4V--60V,常温下持续电流10A ,功率600W !辅助散热条件下,电流可达15A 。
4: 应用: 输出端可以控制大功率的设备,电机,灯泡, LED灯带、直流马达、微型水泵、电磁阀 等,可以输入 PWM ,控制电机转速,灯的亮度等。
5: 使用寿命:无限次开关;工作温度:-40—85 ℃ ;尺寸:4.6*2.9*1.5cm
打印XY轴,轴承,轴承座 销子
齿轮同步轮链轮,轴。轴承
齿轮同步轮链轮
304不锈钢链轮链条齿轮传动产品非标定做 齿条定制现货
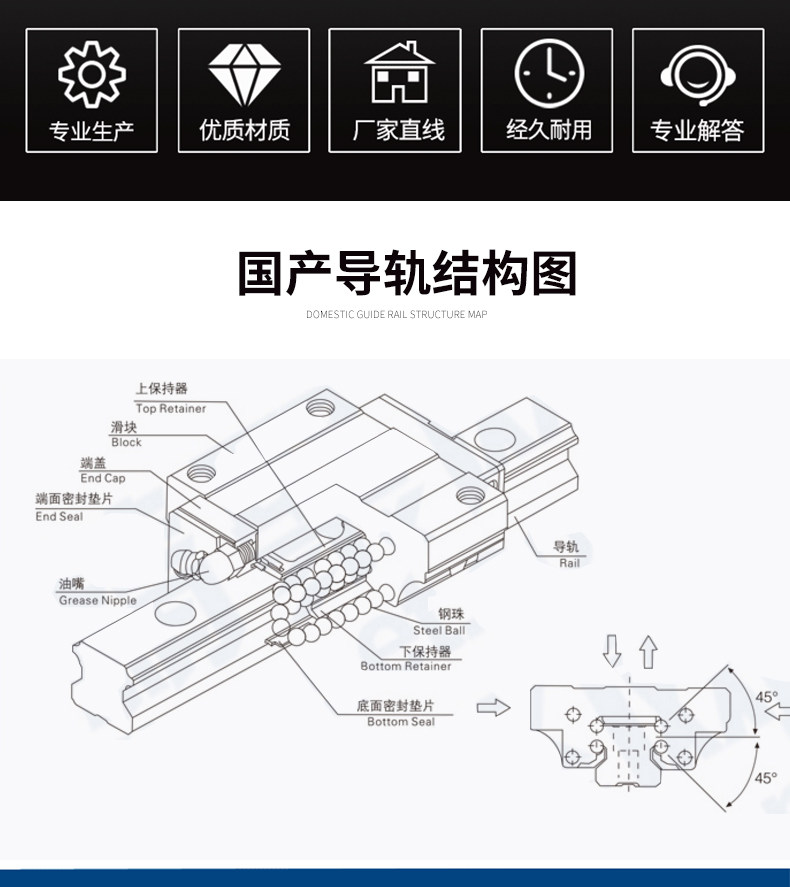
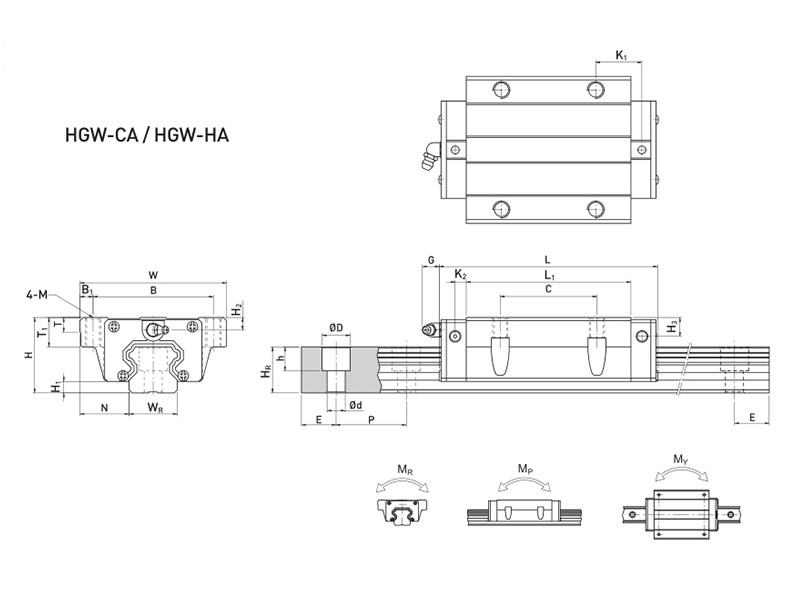
国产导轨 滑块HGR15 20 25 30 35 45 线性导轨 高精度品质
国产直线导轨安装技术及安装
目前滑块颜色变为(绿黑经常有)
(如有 介意颜色的请联系客服确认)
导轨按客户需求长度切割,除质量问题不退不换
除非双方另有约定
购买滑块必读知识 HG15 HG20 HG30HG35HG45
滑块型号为:HG15、HG20、HG25、HG30、HG35、HG45、的买家, 需要知道HG XX(数字)是型号不全面的,
例如:HG20分为HGH20CA HGH20HA HGW20CA HGW20HA 四种 型号侧面统一称之为HG20,其余HG15 HG25 HG30 HG35 HG45也是这样的,所以买家拿到型号,
如果不清楚可以拍照片给客服,由客服帮初次购买的买家介绍相 对 应的产品。
国产直线导轨 台湾品牌互换 原条4米长 可切短 可对接 (线切割平口对接,对接费用另外收取)
不懂请 咨询客服
滚珠丝杆链接: https://item.taobao.com/item.htm?spm=a1z10.1-c.w4004-18591495526.3.53b16292vuBhoo&id=44312747772
以下导轨均为韩国进口原料
15导轨(宽度15) 60元/米 方滑块25元/只 法兰滑块28元/只
20导轨(宽度20) 60元/米 方滑块25元/只 法兰滑块28元/只
25导轨(宽度23) 90元/米 方滑块42元/只 法兰滑块45元/只
30导轨(宽度28) 120元/米 方滑块60元/只 法兰滑块65元/只
35导轨(宽度34) 160元/米 方滑块85元/只 法兰滑块90元/只
45导轨 (宽度45) 260元/米 方滑块150元/只 法兰滑块160元/只
低组EG15导轨(宽度15 轨高12.5组合高24) 75元/米 方滑块28元/只
电机联轴器
铝合金梅花联轴器 伺服电机滚珠丝杆数控机车床弹性星型节连轴器
电机传动装置 丝杆 同步带 齿轮 链条 O带V带
丝杆传动装置 滚轴丝杆
滑动丝杆 自锁
丝杆精度C3 C5 C7 越小越精度高 5S/300MM
丝杆导程
齿条传动
两者分别有自己的应用区间
丝杆传动是通过带动螺杆旋转将螺杆的回转运动转化为螺母的直线运动,刚性比较好,可以传递较大的扭矩,位置准确,频繁换向时容易产生冲击振动。由于螺母内部有滚珠,具有很小的摩擦阻力,滚珠丝杠被广泛应用于各种工业重型设备和精密仪器。
丝杆的主要生产商有:日本THK滚珠丝杠、台湾璟腾 GTEN 滚珠丝杠、台湾ABBA滚珠丝杠、台湾上银 滚珠丝杆、韩国SBC滚珠丝杠、日本NSK滚珠丝杠等
同步带是一种介于皮带和链条,且性能优于皮带和链条的一种特殊齿形带,它包含了皮带、链条及齿轮的优点,在轻载情况下可以代替齿轮来进行传动。
同步带传动具有准确的传动比,无滑差,可获得恒定的速比,传动平稳,能吸振,噪音小,传动比范围大,一般可达1:10。允许线速度可达50M/S,传递功率从几瓦到百千瓦。传动效率高,一般可达98%,结构紧凑,适宜于多轴传动,不需润滑,无污染,因此可在不允许有污染和工作环境较为恶劣的场所下正常工作。 本产品广泛用于纺织、机床、烟草、通讯电缆、轻工、化工、冶金、仪表仪器、食品、矿山、石油、汽车等各行业各种类型的机械传动中。
同步带主要生产厂商有:浙江凯欧、上海伏龙、上海五同、北京利莱诺等
同步带毕竟刚性不足,在精度要求高、响应快的场合,无法达到丝杆所能达到的精度
丝杆传动优点:结构简单、加工容易、成本低、传动轴向力大、可自锁、定位精度高。 缺点:速度低、安装结构大、易磨损。 气动传动优点:无污染、可远距离传动、动作迅速、反应快、维护简单、管路不易堵塞、工作环境适应性好。 缺点:不易实现准确的速度控制和很高的定位精度,工作压力低、传动效率低。
步进传动滚珠丝杠
T型丝杆:滑动丝杆
滚动丝杆:精度高
旋转运动转直线运动
同步带配合同步轮
精密滚珠丝杆滑台 丝杆模组与同步带模组
弹夹式上料
弹夹式上料
自动掉落重量不够可以在上面机上配重
自动化检测设备常见的上料方式有哪些
自动化上料就是把工件或毛坯定向排列,并按照机床工作循环的一定时间间隔,自动地送到自动化检测设备其他工位指定的工作位置。
自动上料装置,是自动化设备中不可缺少的辅助装置,在机械领域里,材料的搬运、机床上下料和整机的装配等是较薄弱的环节。中小型零件,上下料时间约占辅助时间的20-70%,大型零件的上下料时间约占辅助时间的50-70%。
1、震动盘上料
2、提升机上料
3、旋转料盘上料
4、机器人上料
5、传输带上料
6、料仓式上料
弹夹式上料
电磁锁代钥匙
四轴和六轴机器人的区别是什么
作者:优爱宝
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
小型装配机器人之所以获得越来越多包装企业的青睐,正在于它如今已可以胜任包括装配在内的各种包装生产任务,包括所有材料的处理,如取放、装卸、包装成型等包装前端流程相关的工序,以及打标签、检验、抽样等加工工序。需要指出的是,这里所说的小型装配机器人,是指最大有效载荷可达20 kg(44磅)、最远处理距离可达1300mm(51英寸)的机器人。这类机器人有两种基本类型:四轴SCARA机器人(以下简称四轴机器人)和六轴关节式机器人(以下简称六轴机器人)。其中,四轴机器人是特别为高速取放作业而设计的,而六轴机器人则提供了更高的生产运动灵活性
四轴机器人 又称SCARA机械臂
举优爱宝公司生产的四轴机器人例子来作为一个典型案例分析一下
优爱宝机器人具有以下特点分布式控制系统免费开源代码无控制箱的机器人,结构简单低成本、高可靠目的:旨在提供一种低成本,易安装维护,可操作性强的四轴SCARA型机器人。 功能: 分拣、抓取、搬运、封装物件。 SCARA机器人还广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。
六轴机器人
六轴机器人比四轴机器人多两个关节,因此有更多的“行动自由度”。六轴机器人的第一个关节能像四轴机器人一样在水平面自由旋转,后两个关节能在垂直平面移动。此外,六轴机器人有一个“手臂”,两个“腕”关节,这让它具有人类的手臂和手腕类似的能力。
六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部件,以特殊的角度放入包装产品里。他们还可以执行许多由熟练工人才能完成的操作。
机器人自动化包装应用指南在包装生产线上整合机器人技术并得以应用,其实没有有些人想象的那么复杂、危险与高成本,反而是非常简易而安全的,同时也可能获得经济优势。
激光雕刻机
首先,给大家讲解一下制作激光雕刻机所需的硬件: 1、 两个光驱(一个控制 X 轴移动、一个控制 Y 轴移动)。 2、 激光头,是用于灼烧,留下痕迹。 3、 4988 模块,用于驱动电机移动的模块,需要两个哦。 4、 激光驱动 ( 也就是一个电流放大装置, arduino 的输出电流不足以使激光头正常工作,这个可以用 ULN2003 ,也可以用一个 mos 管 ) 。 5、 Arduino 板子,控制整个系统的运作,抱愧哦电机的运动和激光头的控制。 6、 机架,用于固定光驱和激光头。 7、 当然啦,还需要一个48V的电源给光驱供电的。 所需硬件准备好了,就可以来进行搭建了 1、 将 arduino 与 4988 模块进行连接,如下图: 2、 将 4988 模块与光驱连接,如下图: 3、 将 arduion 与 uln2003 连接,如下图: 4、 将 uln2003 与激光头连接,如下图: 将线路连接好之后,就可以将代码下载到arduino里了 下载之后,雕刻机就可以运行了~
基于Arduino的桌面激光雕刻机
最近做了一个基于Arduino的桌面激光雕刻机,照片如下:
这个雕刻机的尺寸大约:150mm x 110mm x 135mm ,雕刻范围大概是 60mm X 60mm ;
使用的材料包括:
1、激光头;
2、亚克力板材;
3、步进电机;
4、arduino电路板;
5、步进电机电机驱动板;
6、继电器;
7、CPU风扇
基本原理就是:
1、在PC上将图片转换为矢量图;
2、编辑矢量图并将其转换为该激光雕刻机可以使用的代码;
3、发送代码至arduino,arduino上运行G代码解释程序控制步进电机与激光头进行雕刻
下面是雕刻的视频:
视频1 ( 木板雕刻 ) :
http://v.youku.com/v_show/id_XNjgyNzU2MDc2.html
视频2(木板雕刻):
http://v.youku.com/v_show/id_XNjgyNzU3NTI0.html
视频3(硬纸板雕刻):
http://v.youku.com/v_show/id_XNjgyNzU3MTgw.html
视频4(木板雕刻):
http://v.youku.com/v_show/id_XNjgyNzU2NjA0.html
一些雕刻的成果展示:
学习PWM引脚
一、学习目标 1.了解Arduino UNO可以输出PWM的引脚。
2.通过PWM调节LED灯的亮度。
原理简介:
Arduino Uno主板上面可以输出PWM的引脚分别是:数字引脚3,5,6,9,10,11,通常会在这些引脚的前面加上“~”。
Pulse Width Modulation 就是通常所说的PWM,译为脉冲宽度调制,简称脉宽调制。脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法,由于计算机不能输出模拟电压,只能输出0 或5V 的的数字电压值,我们就通过使用高分辨率计数器,利用方波的占空比被调制的方法来对一个具体模拟信号的电平进行编码。PWM 信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么是5V(ON),要么是0V(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM 进行编码。输出的电压值是通过通和断的时间进行计算的。
输出电压=(接通时间/脉冲时间)*最大电压值
PWM 被用在许多地方,调光灯具、电机调速、声音的制作等等。
下面介绍一下PWM 的三个基本参数:
1、脉冲宽度
2、脉冲周期(1 秒内脉冲频率个数的倒数)
3、电压高度(例如:0V-5V)
二、硬件搭建 本次课程需要用到的元器件如下:
LED灯*1
220欧姆电阻*1
由接线图可知:
我们将LED接在了~10引脚上。
三、程序分析 方式一:Arduino IDE编程
函数void setup()
针对于这个程序,我们在setup函数中
pinMode(LED,OUTPUT);
将LED灯引脚设置成输出模式。
函数void loop()
for(i = 0;i < 255;i++)
{
analogWrite(LED, i);
delay(10);
}
for(i =255;i > 0; i--)
{
analogWrite(LED, i);
delay(10);
}
主循环函数中是两个for循环。
第一个for循环是将LED的亮度从灭到亮,第二个for循环是将LED灯亮度从亮到灭。
analogWrite(LED, i);
从一个引脚输出模拟值(PWM), 可用于让LED以不同的亮度点亮或驱动电机以不同的速度旋转。analogWrite()输出结束后,该引脚将产生一个稳定的特殊占空比方波,直到下次调用analogWrite()(或在同一引脚调用digitalRead()或digitalWrite())。
语法:analogWrite(pin,value)
其中含有两个参数:pin:用于输入数值的引脚。 value:占空比:0(完全关闭)到255(完全打开)之间。
方式二:Helloblock(Scratch3.0)编程
方式三:米思奇Mixly编程
四、实验现象 程序下载完成之后,我们可以看到LED逐渐变亮,再逐渐变暗,如此循环,产生呼吸灯的效果。
如果不连接至PWM引脚上,程序将不会出现呼吸灯效果。
一文看懂步进电机和舵机及伺服电机的区别
一、步进电机 步进电机:是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。简单的说是靠电脉冲信号来控制角度与转动圈数。所以说他只靠脉冲信号来决定转动多少。因没有传感器
伺服电机:靠伺服控制电路来控制电机的转速,通过传感器来控制转动位置。所以位置控制十分精确。而转速也是可变的。
舵机(电子舵机):舵机的主要组成部分为伺服电机。其中包含伺服电机控制电路+减速齿轮组。哦,对了,伺服电机没有减速齿轮组。而舵机有减速齿轮组。
如果是限位舵机,靠输出轴下面的电位器来确定舵臂转向角度。舵机信号控制是一种脉宽调制(PWM)信号,凡是微控制器能轻松的产生这种信号。
二、步进电机基本原理 工作原理:
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
发热原理:
通常见到的各类电机,内部都是有铁芯和绕组线圈的。绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。
三、舵机的构造 舵机主要是由外壳、电路板、驱动马达、减速器与位置检测元件所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的 IC驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。一般的伺服马达是将细铜线缠绕在三极转子上,当电流流经线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。舵机为求转速快、耗电小,于是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的无极中空转子,并将磁铁置於圆柱体内,这就是空心杯马达。
为了适合不同的工作环境,有防水及防尘设计的舵机;并且因应不同的负载需求,舵机的齿轮有塑胶及金属之区分,金属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。目前新推出的 FET 舵机,主要是采用 FET(Field Effect Transistor)场效电晶体。FET 具有内阻低的优点,因此电流损耗比一般电晶体少。
四、舵机工作原理 由pwm波进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。
舵机PWM的协议都是相同的,但最新出现的舵机可能不一样
协议一般为:高电平宽度在0.5ms~2.5ms控制舵机转过不同的角度
例如某一型号如下:
对于不同的型号可以查找相关的舵机文档
分析:
在此以工作频率为50HZ,即周期为20MS的futaba s3003舵机,和51单片机
有上图可知:不同宽度的脉冲可以产生不同的角度输出,可以利用定时器
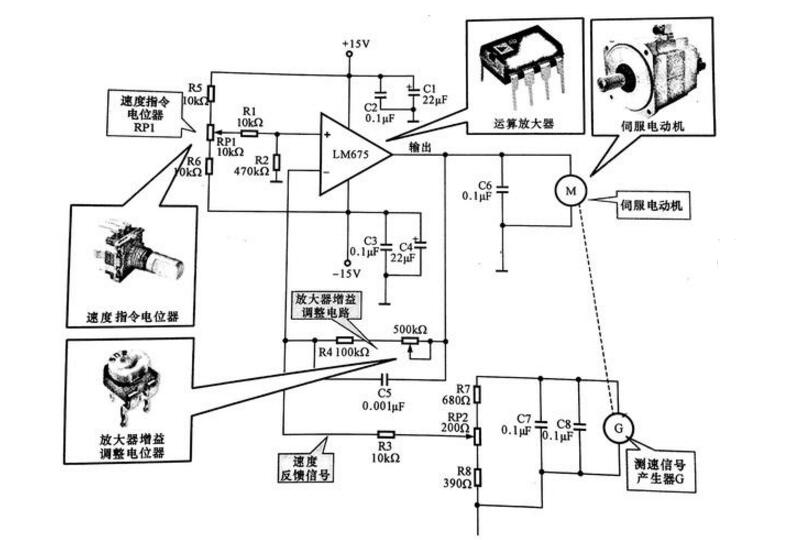
五、伺服电机的工作原理 如下图所示是一种采用功率运算放大器 放大器 运算放大器 运算放大器
伺服电动机的控制原理图
伺服电动机用字母M表示伺服电动机,是驱动系统的动力之源。运算放大器:用电路名称表示,即LM675,是伺服控制电路中的放大器件,为伺服电动机提供驱动电流。
速度指令电位器RP1:在电路中设定运算放大器的基准电压,即速度设定。放大器增益调整电位器RP2:在电路中分别用于微调放大器的增益和速度反馈信号的大小。
当电动机的负载发生变动时,反馈到运算放大器反相输入端的电压也会发生变化,即电动机负载加重时,速度会降低,测速信号产生器的输出电压也会降低,使运算放大器反相输入端的电压降低,该电压与基准电压之差增加,运算放大器的输出电压增加。反之,当负载变小、电动机速度增加时,测速信号产生器的输出电压上升,加到运算放大器反相输入端的反馈电压增加,该电压与基准电压之差减小,运算放大器的输出电压下降,会使电动机的速度随之下降,从而使转速能自动稳定在设定值。
四、舵机工作原理
由pwm波进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。
舵机PWM的协议都是相同的,但最新出现的舵机可能不一样
协议一般为:高电平宽度在0.5ms~2.5ms控制舵机转过不同的角度
例如某一型号如下:
对于不同的型号可以查找相关的舵机文档
分析:
在此以工作频率为50HZ,即周期为20MS的futaba s3003舵机,和51单片机
有上图可知:不同宽度的脉冲可以产生不同的角度输出,可以利用定时器
五、伺服电机的工作原理
如下图所示是一种采用功率运算放大器 放大器 运算放大器 运算放大器
伺服电动机的控制原理图
伺服电动机用字母M表示伺服电动机,是驱动系统的动力之源。运算放大器:用电路名称表示,即LM675,是伺服控制电路中的放大器件,为伺服电动机提供驱动电流。
速度指令电位器RP1:在电路中设定运算放大器的基准电压,即速度设定。放大器增益调整电位器RP2:在电路中分别用于微调放大器的增益和速度反馈信号的大小。
当电动机的负载发生变动时,反馈到运算放大器反相输入端的电压也会发生变化,即电动机负载加重时,速度会降低,测速信号产生器的输出电压也会降低,使运算放大器反相输入端的电压降低,该电压与基准电压之差增加,运算放大器的输出电压增加。反之,当负载变小、电动机速度增加时,测速信号产生器的输出电压上升,加到运算放大器反相输入端的反馈电压增加,该电压与基准电压之差减小,运算放大器的输出电压下降,会使电动机的速度随之下降,从而使转速能自动稳定在设定值。
舵机和伺服电机有什么区别
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
那么舵机是什么呢?舵机是个俗称,是玩航模、船模的人起的。因为这种电机比较常用于舵面操纵。所谓舵机,其实就是个低端的伺服电机系统,它也是最常见的伺服电机系统,因此英文叫做Servo,就是Servomotor的简称。它将PWM信号与滑动变阻器的电压相比对,通过硬件电路 传感器
舵机类型 船用舵机目前多用电液式,即液压
舵机构造 舵机主要是由外壳、电路板 马达 电阻 电流
为了适合不同的工作环境,有防水及防尘设计的舵机;并且因应不同的负载需求,舵机的齿轮有塑胶及金属之区分,金属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。目前新推出的FET舵机,主要是采用FET(FieldEffectTransistor)场效电晶体。FET具有内阻低的优点,因此电流损耗比一般电晶体少。
伺服电机工作原理 1、伺服系统(servomechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
2、交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。
3、伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电 编码器
交流伺服电机和无刷直流伺服电机在功能上的区别:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。
伺服电机作用 伺服电机的主要作用是随着电压的变化控制转速均匀稳定,伺服电机主要是靠脉冲来定位,当接受到一个脉冲电流,就会相应的旋转一个脉冲的对应角度,从而实现唯一,因为伺服电机本身也具有发出脉冲电流的功能,每当旋转一个角度都会发出对应数量的脉冲,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样就能够精确的控制电机的转动,精确的定位可以达到0.001mm。
机械臂关节伺服套装一体机
机械臂关节伺服套装一体机 一般实际使用的工业机器人是不用舵机的。目前只有个人做的或一些娱乐机器人用舵机。 你不能要求所有做机器人的人机械、电子都精通,还地有足够的加工条件,这是不现实的。舵机正好是把需要的都集成了
气动入门知识:气源三联件是什么,分别起什么作用
气压传动是指以压缩空气为动力源来驱动和控制各种机械设备以实现生产过程机械化和自动化的一种技术。随着工业机械化自动化的发展,气动技术越来越广泛地应用于各个领域。
要想了解下气动元件,首先必须要了解气源三联件,它是气动设备的保护神,为气动设备提供干燥、稳定的气源以及很好的润滑。
什么是气源三联件 气源三联件即F.R.L,也就是空气过滤器(F)、减压阀(R)和油雾器(L)三种气源处理元件的组合。
那么他们结合在一起有什么用呢? 其实气源三联件就是用以进入气动仪表之气源净化过滤和减压至仪表供给额定的气源压力,相当于电路中的电源变压器的功能。其中,空气过滤器是用于对气源的清洁,可过滤压缩空气中的水分,避免水分随气体进入装置。减压阀对气源进行稳压,使气源处于恒定状态,可减小因气源气压突变时对阀门或执行器等硬件的损伤。而油雾器对机体运动部件进行润滑,可以对不方便加润滑油的部件进行润滑,大大延长机体的使用寿命。
那么它们在一起如何安装、使用呢?
如图所以,这就是常见的气源三联件,安装的时候过滤器、调压阀(调压过滤器)给油器的固定;将固定支架的凸槽与本体上凹糟匹配,再用固定片及螺丝锁紧即可。单独使用调压阀、调压过滤器时的固定;旋转固定环使之锁紧附带的专用固定片即可。不过,安装时请注意清洗连接管道及接头,避免脏物带入气路。还有安装时要注意气体流动方向与本体上箭头所指方向是否一致,注意接管及接头牙型是否正确。
安装好气源三联件后如何使用呢? 使用方法也非常的简单,可以按照说明书上的操作方法进行操作,不过需要注意的事排水有压差排水与手动排水二种方式,手动排水时当水位达到滤芯下方水平之前必须排出。压力调节时,在转动旋钮前请先拉起再旋转,压下旋转钮为定位。顺时针钮转为调高出口压力,逆时针旋低出口压力。调节压力时应逐步均匀地调至所需压力值,不应一步调节到位。
轴连接方式,轴套
轴连接方式,轴套
轴和轴承连接,是轴与轴承的内圈套在一起,一般都是过盈配合(轴的直径略略大于轴承内圈直径)。这样轴承的内圈紧密地套在轴上,成为一体。如此轴承外圈与轴通过滚珠(或滚柱)的滚动实现低摩擦转动。
联轴器
键槽本身主要是留给键连接放置平键的地方,可以通过键完成轴和轴上齿轮/同步带轮等的连接.
变频器基础介绍
变频器本质是 “电力电子 + 嵌入式控制” 的复合系统 ,分为 硬件电路 和 软件算法 两部分
变频器是一种通过 改变电机供电频率和电压 来调节交流电机转速的电力电子设备 ,核心作用 是:
1.调速控制 :实现电机从 0 到额定转速的无级调速(替代传统机械调速如齿轮箱、阀门);
2.节能降耗 :针对风机、水泵等变负载设备,通过 “流量 / 压力 - 转速” 平方律关系,节能率可达 30%-70%;
3.软启动 / 软停止 :避免电机直接启动时的大电流冲击(通常为额定电流的 5-7 倍),保护电机和电网;
4.转矩控制 :精准调节电机输出转矩(如电梯启停、机床切削),提升设备运行稳定性。
核心逻辑:电机转速公式 n=60f(1−s)/p (f 为频率,s 为转差率,p 为极对数),通过改变 f 即可调节转速,同时需满足 U/f 恒定(维持电机磁通不变)
核心控制对象:异步电机(感应电机)
异步电机是工业生产中最常用的电机类型(如风机、水泵、机床、传送带等设备的驱动电机),也是变频器的 “主要适配对象”,分为 三相异步电机(主流)和 单相异步电机(小功率场景)。
重要控制对象:同步电机
同步电机的转子转速与定子磁场转速同步(n=60f/p,转差率 s=0),需外部励磁(永磁体或励磁绕组),变频器控制技术要求高于异步电机,但在高效、高精度场景应用日益广泛。
变频器不适配的电机类型
以下电机无法直接用普通变频器控制,需特殊改造或专用驱动设备
1.直流电机:
直流电机调速依赖改变电枢电压或励磁电流,需用 “直流调速器”(如可控硅整流器),而非交流变频器。若需用变频器控制,需将直流电机改造为交流电机(如更换为永磁同步电机)。
2.高频电机(>100Hz):
普通变频器载波频率(4-16kHz)和输出频率(通常≤60Hz)无法满足,需选用高频专用变频器(如载波频率≥20kHz)+ 高频电机(加强绝缘、低损耗设计)
3.特种电机(如步进电机、伺服电机) :
步进电机需用 “步进驱动器”(脉冲指令控制),伺服电机需用 “伺服驱动器”(闭环位置控制),普通变频器无法实现高精度位置 / 速度控制(部分高端变频器可兼容伺服电机,但性能不如专用伺服驱动器)
如何通过脉冲控制步进电机与伺服电机的转速
通过脉冲控制步进电机与伺服电机的转速,核心逻辑是 “转速与脉冲频率严格正相关”—— 脉冲频率越高,电机转速越快;频率越低,转速越慢。
通用转速公式(两者适用)
转速(r/min)= 脉冲频率(Hz)×60/每圈脉冲数(P)
推导逻辑:每秒脉冲数 × 60 = 每分钟脉冲数;每分钟脉冲数 ÷ 每圈脉冲数 = 每分钟转数(转速)。